【优化调度】基于matlab粒子群算法求解分布式能源调度优化问题【含Matlab源码 768期】_粒子群算法 编程能解决什么问题-程序员宅基地
技术标签: matlab Matlab优化求解 (进阶版)
博主简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,Matlab项目合作可私信。
个人主页:海神之光
代码获取方式:
海神之光Matlab王者学习之路—代码获取方式
️座右铭:行百里者,半于九十。
更多Matlab仿真内容点击
Matlab图像处理(进阶版)
路径规划(Matlab)
神经网络预测与分类(Matlab)
优化求解(Matlab)
语音处理(Matlab)
信号处理(Matlab)
车间调度(Matlab)
一、粒子群算法简介
1 粒子群算法的概念
粒子群优化算法(PSO:Particle swarm optimization) 是一种进化计算技术(evolutionary computation)。源于对鸟群捕食的行为研究。粒子群优化算法的基本思想:是通过群体中个体之间的协作和信息共享来寻找最优解.
PSO的优势:在于简单容易实现并且没有许多参数的调节。目前已被广泛应用于函数优化、神经网络训练、模糊系统控制以及其他遗传算法的应用领域。
2 粒子群算法分析
2.1基本思想
粒子群算法通过设计一种无质量的粒子来模拟鸟群中的鸟,粒子仅具有两个属性:速度和位置,速度代表移动的快慢,位置代表移动的方向。每个粒子在搜索空间中单独的搜寻最优解,并将其记为当前个体极值,并将个体极值与整个粒子群里的其他粒子共享,找到最优的那个个体极值作为整个粒子群的当前全局最优解,粒子群中的所有粒子根据自己找到的当前个体极值和整个粒子群共享的当前全局最优解来调整自己的速度和位置。下面的动图很形象地展示了PSO算法的过程:
2 更新规则
PSO初始化为一群随机粒子(随机解)。然后通过迭代找到最优解。在每一次的迭代中,粒子通过跟踪两个“极值”(pbest,gbest)来更新自己。在找到这两个最优值后,粒子通过下面的公式来更新自己的速度和位置。
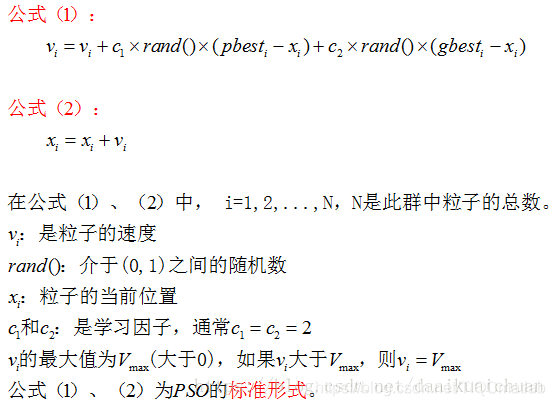
公式(1)的第一部分称为【记忆项】,表示上次速度大小和方向的影响;公式(1)的第二部分称为【自身认知项】,是从当前点指向粒子自身最好点的一个矢量,表示粒子的动作来源于自己经验的部分;公式(1)的第三部分称为【群体认知项】,是一个从当前点指向种群最好点的矢量,反映了粒子间的协同合作和知识共享。粒子就是通过自己的经验和同伴中最好的经验来决定下一步的运动。以上面两个公式为基础,形成了PSO的标准形式。
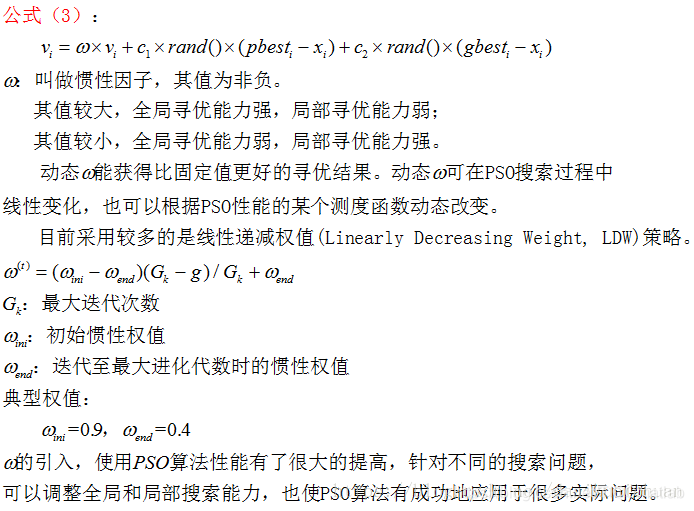
公式(2)和 公式(3)被视为标准PSO算法。
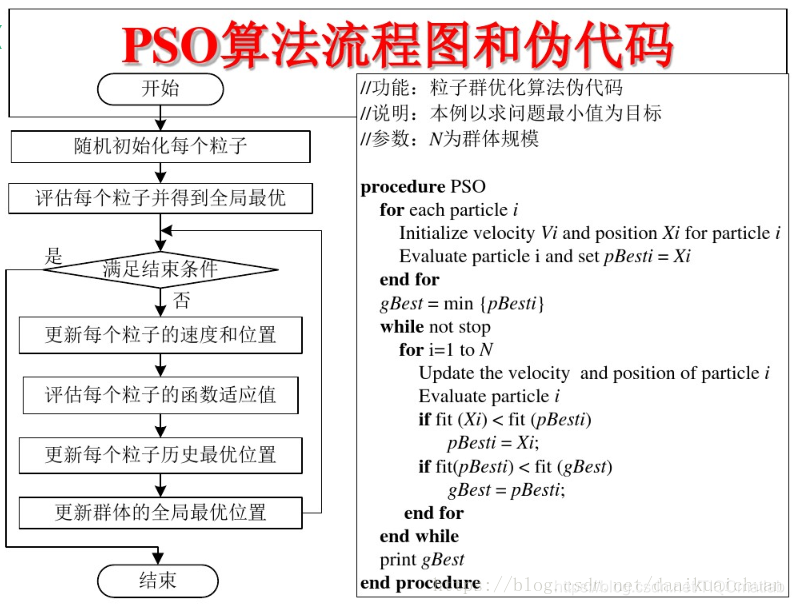
3 PSO算法的流程和伪代码
二、部分源代码
clear
clc
close all
%% 参数初始化
c1=2.05;
c2=2.05;
maxgen=5000;
sizepop=30;
k=0.6;
% wV=1.1;
wP=1.1;
v=5;
popmax=30;
popmin=-30;
% pso_option = struct(‘c1’,1.5,‘c2’,1.7,‘maxgen’,200,‘sizepop’,20, …
% ‘k’,0.6,‘wV’,1,‘wP’,1,‘v’,5, …
% ‘popcmax’,100,‘popcmin’,0.1,‘popgmax’,103,‘popgmin’,10(-2));
% c1:初始为1.5,pso参数局部搜索能力
% c2:初始为1.7,pso参数全局搜索能力
% maxgen:初始为200,最大进化数量
% sizepop:初始为20,种群最大数量
% k:初始为0.6(k belongs to [0.1,1.0]),速率和x的关系(V = kX)
% wV:初始为1(wV best belongs to [0.8,1.2]),速率更新公式中速度前面的弹性系数
% wP:初始为1,种群更新公式中速度前面的弹性系数
% v:初始为5,SVM Cross Validation参数
% popcmax:初始为100,SVM 参数c的变化的最大值.
% popcmin:初始为0.1,SVM 参数c的变化的最小值.
% popgmax:初始为1000,SVM 参数g的变化的最大值.
% popgmin:初始为0.01,SVM 参数c的变化的最小值.
D=10; %%%维数
Vmax =k*popmax;
Vmin = -Vmax ;
eps =1E-5;
%% 产生初始粒子和速度
pop=zeros(sizepop,D);
V=zeros(sizepop,D);
fitness=zeros(sizepop,1);
for i=1:sizepop
% 随机产生种群和速度
pop(i,:) = (popmax-popmin)*rand(1,D)+popmin;
V(i,:)=Vmax*rands(1,D);
% 计算初始适应度
fitness(i)=myfunc_fit1(pop(i,:));
end
Xd_ave0=repmat(sum(pop)/sizepop,sizepop,1);
D_t0=sum((sum((pop-Xd_ave0).2,2)).0.5)/sizepop/(popmax-popmin);
wV=1/(1+exp(-12*(D_t0-0.5)));
D_min=D_t0*0.2;
% 找极值和极值点
[global_fitness bestindex]=min(fitness); % 全局极值
local_fitness=fitness; % 个体极值初始化
global_x=pop(bestindex,:); % 全局极值点
local_x=pop; % 个体极值点初始化
% 每一代种群的平均适应度
avgfitness_gen = zeros(maxgen,1);
fit_gen=zeros(maxgen,1);
%% 迭代寻优
for i=1:maxgen
for j=1:sizepop
%速度更新
V(j,:) = wV*V(j,:) + c1*rand*(local_x(j,:) - pop(j,:)) + c2*rand*(global_x - pop(j,:));
if find(V(j,:) > Vmax)
V_maxflag=find(V(j,:) > Vmax);
V(j,V_maxflag) = Vmax;
end
if find(V(j,1) < Vmin)
V_minflag=find(V(j,1) < Vmin);
V(j,V_minflag) = Vmin;
end
%种群更新
pop(j,:)=pop(j,:) + wP*V(j,:);
if find(pop(j,:) > popmax)
pop_maxflag=find(pop(j,:) > popmax);
pop(j,pop_maxflag) = popmax;
end
if find(pop(j,:) < popmin)
pop_minflag=find(pop(j,:) < popmin);
pop(j,pop_minflag) = popmin;
end
% 自适应粒子变异
if rand>0.5
k=ceil(2*rand);
pop(j,k) = (popmax-popmin)*rand + popmin;
end
%适应度值
fitness(j)=myfunc_fit1(pop(j,:));
%个体最优更新
if fitness(j) < local_fitness(j)
local_x(j,:) = pop(j,:);
local_fitness(j) = fitness(j);
end
% if fitness(j) == local_fitness(j) && length(pop(j,:) < local_x(j,:))
% local_flag=find(pop(j,:) < local_x(j,:));
% local_x(j,local_flag) = pop(j,local_flag);
% local_fitness(j) = fitness(j);
% end
%群体最优更新
if fitness(j) < global_fitness
global_x = pop(j,:);
global_fitness = fitness(j);
end
function C=PSO_FUNC(X)
global G_AC T_C hour_num Wind_V
C_W=110; %%%风力发电
P_W=100;
u_PW=6;
m_WG=20;
r0=0.06;
v_ci=3; %切入风速
v_r=12; %额定风速
v_co=25; %切除风速
P_r=P_W;
V_t=repmat(Wind_V(:,3),52,1);
C_S=0.7; %%%%光伏发电
P_S=0.2;
u_PS=0.009;
m_PV=25;
C_B=0.5; %%%蓄电池
u_WB=0.0014;
m_B=5;
sigam_bat=1e-4; %%%自放电率
N_B=2000;
W_B=0.64;
Wbat_0=0.5N_BW_B;
Pbat_max=0.2N_BW_B;
Pbat_min=-0.2N_BW_B;
Pbat_maxt=Pbat_max;
Pbat_mint=Pbat_min;
Wbat_t=zeros(hour_num,1);
Wbat_t(1)=Wbat_0; %%%剩余电量
Pbat_t=zeros(hour_num,1);
Pbat_t(1)=Pbat_max;
C_d=10; %%%柴油机发电
u_Pd=0.95;
P=4.62;
Q_d0=0.22;
m_die=10;
P_STC=0.2;
G_STC=1;
K=-0.47;
Tr=298.15;
T_C=T_C+273.15;
P1_t=300; %%%居民负荷峰值 KW
Pdes_t=200; %%%海水淡化负荷 KW
P_des=25; %%%单台海水淡化机组的额定功率 KW
N_des=8; %%%海水淡化机组总台数
G_des=100/24; %%%单台机组每小时的产水量 100t/d
Rwater_t=500/24; %%%岛上全天用水需求 t
Rdes_min=0;
Rdes_max=8*100/24;
eta_c=0.97;
Rdes_t=zeros(hour_num,1);
Rdes_t(1)=Rdes_max; %%最初蓄水量
P_PV=zeros(hour_num,1);
P_WG=zeros(hour_num,1);
P_PVM_t=zeros(hour_num,1);
P_WGM_t=zeros(hour_num,1);
P_net_t=zeros(hour_num,1);
Pdie_t=zeros(hour_num,1);
C_f=0; %%%柴油年成本
yeushu1=0;
yeushu2=0;
yeushu3=0;
yeushu4=0;
yeushu5=0;
yeushu6=0;
yeushu7=0;
yeushu8=0;
for i=1:hour_num
P_PV(i)=P_STCG_AC(i).(1+K*(T_C(i)-Tr))/G_STC;
a=P_r/(v_r3-v_ci3);
b=v_ci3/(v_r3-v_ci^3);
if (V_t(i)<v_ci)
P_WG(i)=0;
elseif (v_ci<V_t(i)<v_r)
P_WG(i)=aV_t(i)^3-bP_r;
elseif (v_r<V_t(i)<v_co)
P_WG(i)=P_r;
else
P_WG(i)=0;
end
if(Rdes_t(i)-Rdes_max>=Rwater_t)
Ndes_mint=0;
else
Ndes_mint=(Rwater_t-(Rdes_t(i)-Rdes_max))/G_des;
end
if(Rdes_t(i)+N_des*P_des-Rwater_t<=Rdes_max)
Ndes_maxt=N_des*P_des;
else
Ndes_maxt=(Rdes_max+Rwater_t-Rdes_t(i))/P_des;
end
Pdes_mint=Ndes_mint*P_des;
Pdes_maxt=Ndes_maxt*P_des;
P_PVM_t(i)=P_PV(i);
P_WGM_t(i)=P_WG(i);
P_net_t(i)=P_WGM_t(i)+P_PVM_t(i)-P1_t;
if(i>=2)
Pbat_maxt=min([Pbat_max ((1-sigam_bat)*Wbat_t(i)-((1-sigam_bat)*Wbat_t(i)+Pbat_t(i)))*eta_c]);
Pbat_mint=max([Pbat_min ((1-sigam_bat)*Wbat_t(i)-((1-sigam_bat)*Wbat_t(i)+Pbat_t(i)))/eta_c]);
end
三、运行结果



四、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1] 包子阳,余继周,杨杉.智能优化算法及其MATLAB实例(第2版)[M].电子工业出版社,2016.
[2]张岩,吴水根.MATLAB优化算法源代码[M].清华大学出版社,2017.
3 备注
简介此部分摘自互联网,仅供参考,若侵权,联系删除
仿真咨询
1 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化
2 机器学习和深度学习方面
卷积神经网络(CNN)、LSTM、支持向量机(SVM)、最小二乘支持向量机(LSSVM)、极限学习机(ELM)、核极限学习机(KELM)、BP、RBF、宽度学习、DBN、RF、RBF、DELM、XGBOOST、TCN实现风电预测、光伏预测、电池寿命预测、辐射源识别、交通流预测、负荷预测、股价预测、PM2.5浓度预测、电池健康状态预测、水体光学参数反演、NLOS信号识别、地铁停车精准预测、变压器故障诊断
3 图像处理方面
图像识别、图像分割、图像检测、图像隐藏、图像配准、图像拼接、图像融合、图像增强、图像压缩感知
4 路径规划方面
旅行商问题(TSP)、车辆路径问题(VRP、MVRP、CVRP、VRPTW等)、无人机三维路径规划、无人机协同、无人机编队、机器人路径规划、栅格地图路径规划、多式联运运输问题、车辆协同无人机路径规划、天线线性阵列分布优化、车间布局优化
5 无人机应用方面
无人机路径规划、无人机控制、无人机编队、无人机协同、无人机任务分配
6 无线传感器定位及布局方面
传感器部署优化、通信协议优化、路由优化、目标定位优化、Dv-Hop定位优化、Leach协议优化、WSN覆盖优化、组播优化、RSSI定位优化
7 信号处理方面
信号识别、信号加密、信号去噪、信号增强、雷达信号处理、信号水印嵌入提取、肌电信号、脑电信号、信号配时优化
8 电力系统方面
微电网优化、无功优化、配电网重构、储能配置
9 元胞自动机方面
交通流 人群疏散 病毒扩散 晶体生长
10 雷达方面
卡尔曼滤波跟踪、航迹关联、航迹融合
智能推荐
npm ERR! code CERT_HAS_EXPIRED npm ERR! errno CERT_HAS_EXPIRED npm ERR! request to https://registry.-程序员宅基地
文章浏览阅读3.5k次,点赞16次,收藏13次。再次执行npm install ***,还不行可以尝试设置你的npm镜像源为http开头的,不使用https。npm install时报错code CERT_HAS_EXPIRED。这就说:npm的证书失效了,它不再支持自签名证书。发现我们之前配置了下载镜像源为https开头的,执行命令清除npm缓存。执行命令取消ssl验证。_npm err! code cert_has_expired npm err! errno cert_has_expired npm err! requ
鸿蒙HarmonyOS应用开发之Node-API常见问题,HarmonyOS鸿蒙面试试题-程序员宅基地
文章浏览阅读889次,点赞21次,收藏14次。4.鸿蒙开发系统底层方向。1.项目开发必备面试题。5.鸿蒙音视频开发方向。6.鸿蒙车载开发方向。7.鸿蒙南向开发方向。
Linux下RPM软件包的安装及卸载-程序员宅基地
文章浏览阅读2.7k次。2019独角兽企业重金招聘Python工程师标准>>> ..._ql80-community-release-el7-3.noarch.rpm:不更新已安装的软件包。
腾讯云frp连接失败。login to server failed: dial tcp x:7000: connectex: A connection attempt failed because-程序员宅基地
文章浏览阅读8.2w次,点赞14次,收藏34次。地址:https://github.com/fatedier/frp简介:一个高效的反向代理:A fast reverse proxy to help you expose a local server behind a NAT or firewall to the internet.最全面的官方教程文档:https://gofrp.org自我记录:a、使用TCP代理,开启本地服务器的访问。Linux服务器启动 frps命令:nohup ./frps -c frps.ini(无挂起启动命令。可以_login to server failed: dial tcp
在WPF TreeView中使用复选框_vfp treeview复选框-程序员宅基地
文章浏览阅读1.8k次,点赞3次,收藏8次。本文回顾了一个WPFTreeView,其项目包含复选框。每个项目都绑定到一个ViewModel对象。当ViewModel对象的检查状态发生变化时,它会将简单的规则应用于其父项和子项的检查状态。本文还展示了如何使用附加行为概念将一个TreeViewItem变为虚拟ToggleButton,这有助于使TreeView的键盘交互简单直观。_vfp treeview复选框
零差检测,外差检测 以及 激光雷达中的零差探测和外差探测-程序员宅基地
文章浏览阅读1.9w次,点赞36次,收藏127次。一篇论文说激光雷达技术从原理上可以分为相干测量和直接测量,其中,相干探测也可以分为零差探测和外差探测;直接探测则可以分为模拟探测和单光子探测。由于不懂"相干探测也可以分为零差探测和外差探测"中的零差探测和外差探测,故写本文以说明零差检测、外差检测、内差检测 以及"相干探测也可以分为零差探测和外差探测" 的具体含义。1. 零差检测,外差检测和内差检测本节分3个小节分别叙述零差检测、外差检测和内差检测。在每个小节中,首先给出各个地方对该小节探测方法的定义和说明,之后再对该小节的探测方法..._外差检测
随便推点
重复测量数据多重填补 SAS code_mmrm模型-程序员宅基地
文章浏览阅读4.6k次,点赞2次,收藏33次。sas code 对多次访视数据进行多重填补_mmrm模型
HashMap和HashSet-程序员宅基地
文章浏览阅读5.6k次,点赞7次,收藏28次。HashMap和HashSet的区别与联系_hashmap和hashset
mysql集群搭建与总结_mysql 不同端口组成集群-程序员宅基地
文章浏览阅读3.2k次,点赞8次,收藏47次。文章目录1.主从复制好久没写博客了,最近做了分布式的项目,调查和搭建了mysql集群,踩坑无数,特此记录。1.主从复制主从复制是最简单的mysql集群,_mysql 不同端口组成集群
Cobalt Strike 的安装与简单使用_cobalt strike客户端英文怎么改成中文-程序员宅基地
文章浏览阅读3k次,点赞8次,收藏34次。一、什么是Cobalt StrikeCobalt Strike 是一个为对手模拟和红队行动而设计的平台,主要用于执行有目标的攻击和模拟高级威胁者的后渗透行动。二、如何使用Cobalt Strike 分为服务器端和客户端(在同一压缩文件中,知识运行的文件不同),服务器端必须要在受支持的 linux 系统上运行,客户端可在 windows/linux/mac 系统上运行1.在 kali2021.1 中运行服务器端进入 cobaltstrike 目录下,运行 ./teamserver# ./teams_cobalt strike客户端英文怎么改成中文
[USF-XSim-62] 'elaborate' step failed with error(s).使用vivado进行verilog实验,无法进行仿真,如何解决?-程序员宅基地
文章浏览阅读6.9w次,点赞25次,收藏41次。我之前用的vivado2014.3后来用的vivado2015.03,在Windows10操作系统上,想要仿真的时候报如下类似错误[USF-XSim 62] 'elaborate' step failed with error(s). Please check the Tcl console output or 'D:/lirongcui/learning/cameralink_dri_[usf-xsim-62] 'elaborate' step failed with error(s). please check the tcl co
Java实现AES-128-CBC算法加解密_java aes解密方式(aes-128-cbc)-程序员宅基地
文章浏览阅读1.6w次,点赞3次,收藏13次。AES加解密工具类import java.security.MessageDigest;import java.security.NoSuchAlgorithmException;import java.util.ArrayList;import java.util.Collections;import java.util.HashMap;import java.util.List..._java aes解密方式(aes-128-cbc)