毕设项目 基于wifi的室内定位算法设计与实现-程序员宅基地
文章目录
0 前言
今天学长向大家分享一个毕业设计项目
毕业设计 wifi室内定位系统
学长这里给一个题目综合评分(每项满分5分)
- 难度系数:3分
- 工作量:3分
- 创新点:4分
项目运行效果:
毕业设计 wifi室内定位算法实现
项目获取:
https://gitee.com/assistant-a/project-sharing
简介
今天来介绍一下室内定位相关的原理以及实现方法;
WIFI全称WirelessFidelity,在中文里又称作“行动热点”,是Wi-Fi联盟制造商的商标做为产品的品牌认证,是一个创建于IEEE 802.11标准的无线局域网技术。基于两套系统的密切相关,也常有人把Wi-Fi当做IEEE 802.11标准的同义术语。“Wi-Fi”常被写成“WiFi”或“Wifi”,但是它们并没有被Wi-Fi联盟认可。它的最大优点就是传输速度较高,可以达到11Mbps,另外它的有效距离也很长,同时也与已有的各种802.11 DSSS设备兼容。
wifi定位的本质实际上是基站式定位, 是依靠wifi AP以自身为中心, 向外辐射逐渐衰弱的指纹来进行定位的.
wifi定位背景和意义
GPS难以解决室内环境下的一些定位问题,大部分室内环境下都存在WiFi,因此利用WiFi进行定位无需额外部署硬件设备,是一个非常节省成本的方法。然而WiFi并不是专门为定位而设计的,传统的基于时间和角度的定位方法并不适用于WiFi。近十年来,在室内WiFi场景下的定位中,位置指纹法被广泛研究和采用。本文对WiFi位置指纹法进行综述,提出了这个领域面临的挑战,介绍最新的研究,以及提供一些实际的指导。
基本原理
什么是wifi指纹
“位置指纹”把实际环境中的位置和某种“指纹”联系起来,一个位置对应一个独特的指纹。这个指纹可以是单维或多维的,比如待定位设备在接收或者发送信息,那么指纹可以是这个信息或信号的一个特征或多个特征(最常见的是信号强度)。如果待定位设备是在发送信号,由一些固定的接收设备感知待定位设备的信号或信息然后给它定位,这种方式常常叫做远程定位或者网络定位。如果是待定位设备接收一些固定的发送设备的信号或信息,然后根据这些检测到的特征来估计自身的位置,这种方式可称为自身定位。待定位移动设备也许会把它检测到的特征传达给网络中的服务器节点,服务器可以利用它所能获得的所有信息来估计移动设备的位置(翻译存疑…),这种方式可称为混合定位。在所有的这些方式中,都需要把感知到的信号特征拿去匹配一个数据库中的信号特征,这个过程可以看作一个模式识别的问题。
wifi指纹由什么组成
位置指纹可以是多种类型的,任何“位置独特”的(对区分位置有帮助的)特征都能被用来做为一个位置指纹。比如某个位置上通信信号的多径结构、某个位置上是否能检测到接入点或基站、某个位置上检测到的来自基站信号的RSS(接收信号强度)、某个位置上通信时信号的往返时间或延迟,这些都能作为一个位置指纹,或者也可以将其组合起来作为位置指纹。
wifi指纹定位实现方法
wifi定位方法基本上可以分为两大类:
不基于RSSI
- TOA(time ofarrival)
- TDOA(time difference of arrival)
- AOA(angle of arrival)
基于RSSI
在智能手机上,可以通过系统SDK获取到周围各个AP(Access Point)发送的信号强度RSSI及AP地址,利用RSSI来定位目前看来是最可行的方法,因此下面着重介绍,基于RSSI定位主要有两个算法:三角定位算法,指纹算法。
定位算法
-
随机方法
将测试点(Test Point, TP)的预测位置设为任一参考点(Reference Point,RP)的位置。 -
KNN方法
KNN方法的主要思路是:找出与TP的WiFi指纹相似度最高的K个RP,然后平均这K个RP对应的位置,最终得到TP的位置。 -
Prob方法
Prob方法的主要思路是:通过贝叶斯公式,计算TP出现在每个RP上的后验概率,取k个概率最大的RP,然后平均这K个RP对应的位置,最终得到TP的位置。 -
Stg方法
Stg方法是KNN方法的一种改进方法,它通过TP的k个信号最强的信号接入点来筛选RP,然后再应用KNN方法。 -
Gk方法
GK方法的主要思路是通过高斯核密度估计器(Gaussian Kernel Density Estimator,GKDE)计算每个指纹位置的相对过饱和度的可能性,并通过平均与最高似然值对应的位置来确定TP的位置。
基于无线信号的三边(三角定位)
这个方法来自于传统的定位方法,类似GPS,假如我们能够获得我们待定位点相对于其它基站的距离或者角度,通过交会列多元方程组求解的方法可以求出我们所在的位置,当然了,实际情况中往往不是求解刚好够定位的方程组,而是用多余的观测值然后利用最小二乘估计方法来估计位置。以下图为例,对于三个基站,我们如果能够获得信号发射和接受的时间差,那么就可以通过时间差和光速传播来求取距离从而获得定位。
但是,对于普通的WiFi,蓝牙信号,要想求出从信号发射到信号接收之间的时间差,基本是不可能的。因为你要保持两边的时间同步,才能通过发射时间和接收时间来求取时间差,考虑到c光速的巨大,时间差一点点距离就能差非常远。所以基本不可能通过时间差的方法来进行定位。

那么室内定位里面的三边定位是怎么实现的呢?
我们知道,只要求取当前目标和各个基站的距离,就能求解目标位置。而这个距离既然不能通过时间和光速之积来获得,我们可以通过另一个方法来获得,那就是信号衰减模型,如下图所示,我们知道在离线状态下,无线信号强度在空间中传播随着距离衰减! 而这个无线信号强度对于手机上的接收器来说是可测的!那么根据测试到的信号强度,是不是可以根据下图的衰减模型(公式)来反推出距离呢,那么这样不就又可以用三边定位了。
地图绘制
数据采集点位置

AP点位置

测试结果

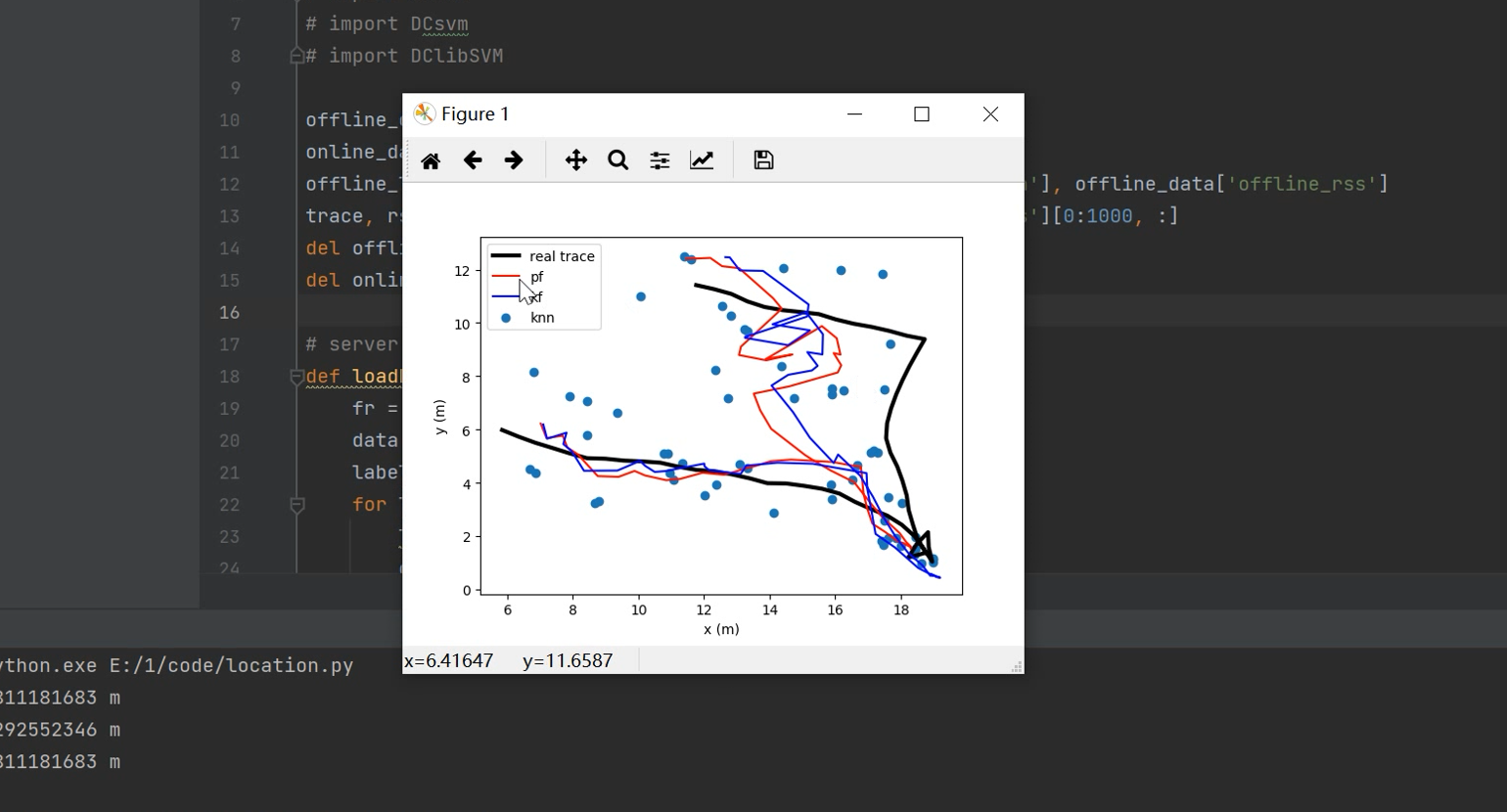
算法实现效果
详细设计论文
最后
项目运行效果:
毕业设计 wifi室内定位算法实现
项目获取:
智能推荐
【附源码】计算机毕业设计java学生学科竞赛管理系统设计与实现_学科竞赛管理系统开发与应用-程序员宅基地
文章浏览阅读1.1k次,点赞2次,收藏20次。项目运行环境配置:Jdk1.8 + Tomcat7.0 + Mysql + HBuilderX(Webstorm也行)+ Eclispe(IntelliJ IDEA,Eclispe,MyEclispe,Sts都支持)。项目技术:SSM + mybatis + Maven + Vue 等等组成,B/S模式 + Maven管理等等。环境需要1.运行环境:最好是java jdk 1.8,我们在这个平台上运行的。其他版本理论上也可以。2.IDE环境:IDEA,Eclipse,Myeclipse都可以。_学科竞赛管理系统开发与应用
matlab错误使用 矩阵维度必须一致,错误使用 + 矩阵维度必须一致-程序员宅基地
文章浏览阅读1.5k次。function dx=shuangzhou(t,x,Tmh,Tmp,Mh,Ihx,Ihy,Ihz,Ihxy,Ihxz,Ihyz,Mp,Ipx,Ipy,...Ipz,Ipxy,Ipxz,Ipyz,g,xh,yh,zh,xp,yp,zp,xhp,yhp,zhp,xch,ych,zch,u,v,w,...p,q,r,theta,varphi,Ch,Cp,Kp)A=p*cos(x(1))*cos(x(2..._错误使用+
Java 异常:捕获异常_java子异常与父异常如何补获-程序员宅基地
文章浏览阅读611次。语法结构 1.捕获异常语法结构: 红框:使用try{}块来抛出异常蓝框:使用try{}块来抛出异常橙框:由于对循环体中的异常进行了捕获处理,所以该行代码可以执行 2.try…catch…finally异常处理结构中,try语句块是必须的, catch和finally语句块至少出现一个。 3.注意:如果try语句块包含的是检查时异常,则在没有..._java子异常与父异常如何补获
【最新Unity3D—Particle System粒子系统】最新Unity2017.2018.2019.2020均适用且超详细_unity particle system 实例化-程序员宅基地
文章浏览阅读299次。方法1.GameObject中选择Particle System,即可在场景中创建粒子系统对象方法2.先create empty ,再到Component中选择Effects后,选择Particle System,即为该空物体添加了粒子系统组件。_unity particle system 实例化
通过EasyX实现Bresenham画线_easyx线条粗细-程序员宅基地
文章浏览阅读1k次,点赞2次,收藏3次。基本上Bresenham画线算法的思路如下:// 假设该线段位于第一象限内且斜率大于0小于1,设起点为(x1,y1),终点为(x2,y2).// 根据对称性,可推导至全象限内的线段.1.画起点(x1,y1).2.准备画下个点。x坐标增1,判断如果达到终点,则完成。否则,由图中可知,下个要画的点要么为当前点的右邻接点,要么是当前点的右上邻接点.2.1.如果线段ax+by+c=0与x=x1..._easyx线条粗细
i5-1035G1和R7 4800U 哪个好_r74800u和i51035g1哪个好-程序员宅基地
文章浏览阅读7.7k次。酷睿i5-1035G1是一款高效的四核SoC,适用于基于Ice -Lake-U 系列的笔记本电脑和超极本 。它集成了四个Sunnycove处理器内核(由于HyperThreading而支持8个线程),主频为1(基本) – 3.7(单核Turbo)GHz。选锐龙i5-1035G1 还是R7 4800U 哪个好 https://list.jd.com/list.html使用Turbo Boost,2个内核可以达到3.6 GHz,所有4个3.3 GHz。据英特尔称,Sunnycove内核的IPC数量增加了1_r74800u和i51035g1哪个好
随便推点
OpenGL SuperBible 7th源码编译记录_superbible7-media github-程序员宅基地
文章浏览阅读765次。OpenGL SuperBible 7th 源码编译_superbible7-media github
Wireshark简单使用-程序员宅基地
文章浏览阅读794次,点赞14次,收藏18次。wireshark下载、安装、使用教程
MXNet 粗糙的使用指南_iou loss mxnet-程序员宅基地
文章浏览阅读288次。MXNet 粗糙的使用指南写于2020年3月24日,最新的CUDA版本为10.2MXNet简介MXNet是一个(跟TF与Torch相比特别小众的)多平台神经网络框架。优点:灵活,多平台,可移植性强。工业界常用框架。缺点:复杂,难以入门,基本没有教材。只能依靠代码来学习代码。框架介绍MXNet现在存在两种界面:symbol与gluon。Symbol的设计思路与T..._iou loss mxnet
iOS对ipa包进行代码混淆《二》 ---代码混淆_ipa包混淆-程序员宅基地
文章浏览阅读1.3k次。接上一篇文章ipa包砸壳,接下来讲一下代码混淆。混淆代码,我们需要生成两个文件confuse.sh和func.list。confuse.sh是一个脚本文件,里边定义了混淆的一些算法,以及需要混淆方法的路径。func.list是我们列举的一些需要混淆的方法。当然系统的方法不能混淆,不然一些库文件方法没办法正确加载。1、首先,终端cd到文件目录,并且利用指令touch生成这两个文件touch confuse.shtouch func.list不出意外,文件目录里已经有这两个文件了。_ipa包混淆
matlab(4):特殊符号的输入_matlab微米怎么输入-程序员宅基地
文章浏览阅读3.3k次,点赞5次,收藏19次。xlabel('\delta');ylabel('AUC');具体符号的对照表参照下图:_matlab微米怎么输入
C语言程序设计-文件(打开与关闭、顺序、二进制读写)-程序员宅基地
文章浏览阅读119次。顺序读写指的是按照文件中数据的顺序进行读取或写入。对于文本文件,可以使用fgets、fputs、fscanf、fprintf等函数进行顺序读写。在C语言中,对文件的操作通常涉及文件的打开、读写以及关闭。文件的打开使用fopen函数,而关闭则使用fclose函数。在C语言中,可以使用fread和fwrite函数进行二进制读写。 Biaoge 于2024-03-09 23:51发布 阅读量:7 ️文章类型:【 C语言程序设计 】在C语言中,用于打开文件的函数是____,用于关闭文件的函数是____。