点云数据集汇总整理(匠心之作,附官方下载地址)-程序员宅基地
技术标签: deep learning 点云
点云公开数据集
最近更新:2023年10月
不能详尽,若有错误,欢迎指正补充。如果你对数据集下载有疑问,欢迎留言讨论
1 点云分类和分割
1.1 ModelNet40 (点云分类)
普林斯顿 ModelNet 项目的目标是为计算机视觉、计算机图形学、机器人学和认知科学领域的研究人员提供全面、干净的对象 3D CAD 模型集合。
包含数据集:
ModelNet40:ModelNet10:modelnet40_ply_hdf5_2048:modelnet40_normal_resampled:
数据内容: 飞机、汽车、椅子、碗、瓶、键盘、楼梯、…
采集方式: CAD建模,在模型上采集点云
发布单位: 普林斯顿大学
下载地址: http://modelnet.cs.princeton.edu,(部分可直接下载,其它需要邮件作者)
1.2 ShapeNet (部件分割)
一个注释丰富的大规模 3D 形状数据集
包含数据集:
ShapeNetCore:ShapeNet数据集的一个子集,干净的3D模型,经过手动验证的分类和注释标签。它涵盖55个常见对象类别,约51300个独特的3D模型。ShapeNetSem:一个更小、注释更密集的子集,由12000个模型组成,分布在更广泛的270个类别中。除了手动验证的类别标签和一致的对齐方式外,这些模型还使用真实世界的尺寸标注、类别级别的材料成分估计值以及总体积和重量估计值进行注释。
数据内容: 飞机、汽车、桌子、椅子、电脑、浴缸、…
采集方式:
发布单位: 普林斯顿大学,斯坦福大学,TTIC
下载地址: https://shapenet.org/,(需要注册并审核通过)
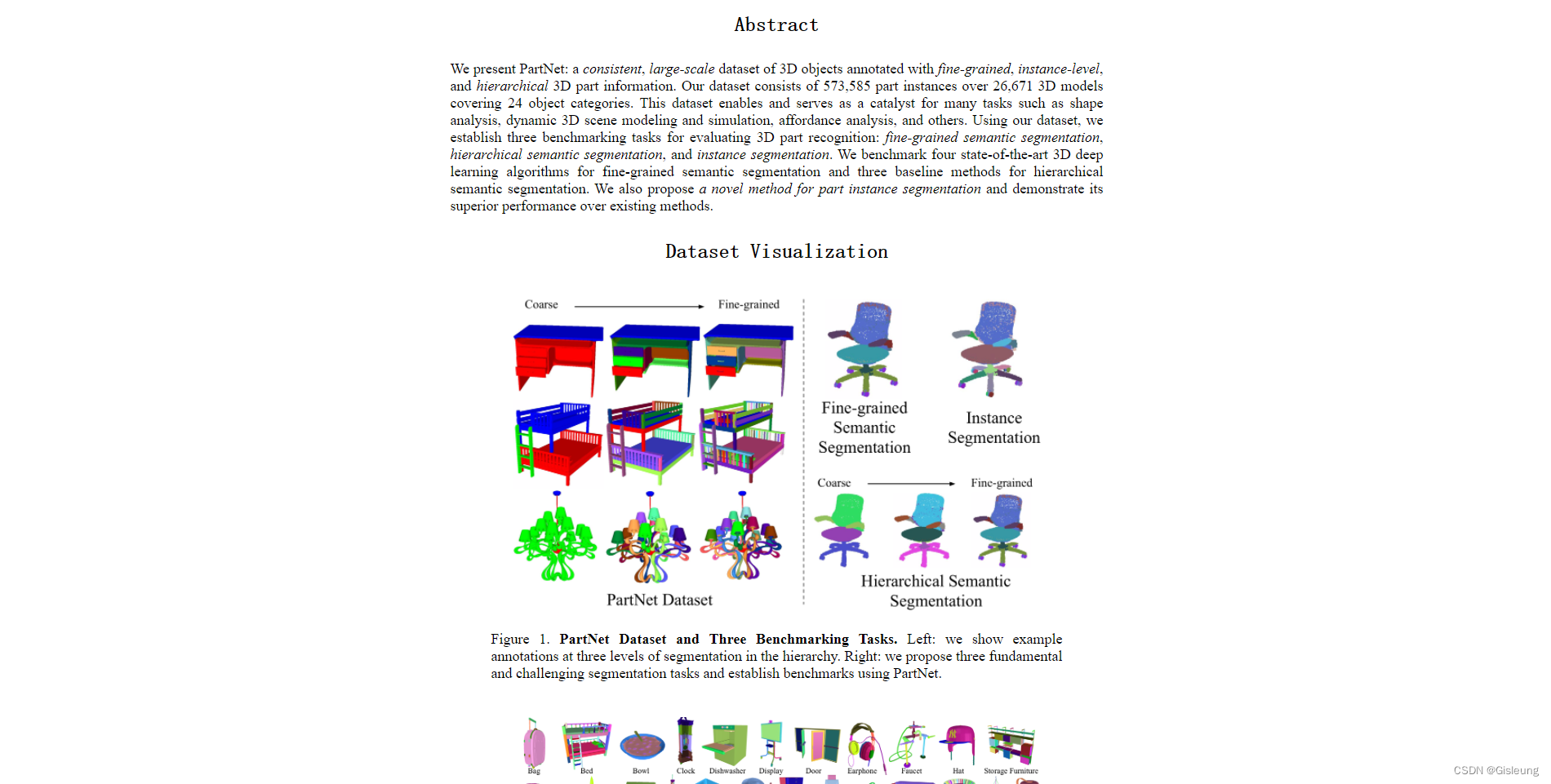
1.3 PartNet (部件分割)
一个一致的、大规模的 3D 对象数据集,用细粒度的、实例级的和分层的3D 零件信息进行注释。数据集包含 26,671 个 3D 模型的 573,585 个零件实例,涵盖 24 个对象类别。
包含数据集:
PartNet-v0/v1:语音分割PartNet-Symh:使用二元对称层次结构丰富了我们的 PartNet 数据集
数据内容: 桌子、椅子、床、耳机、电脑、…
采集方式:
发布单位: 斯坦福大学等
下载地址: https://partnet.cs.stanford.edu/
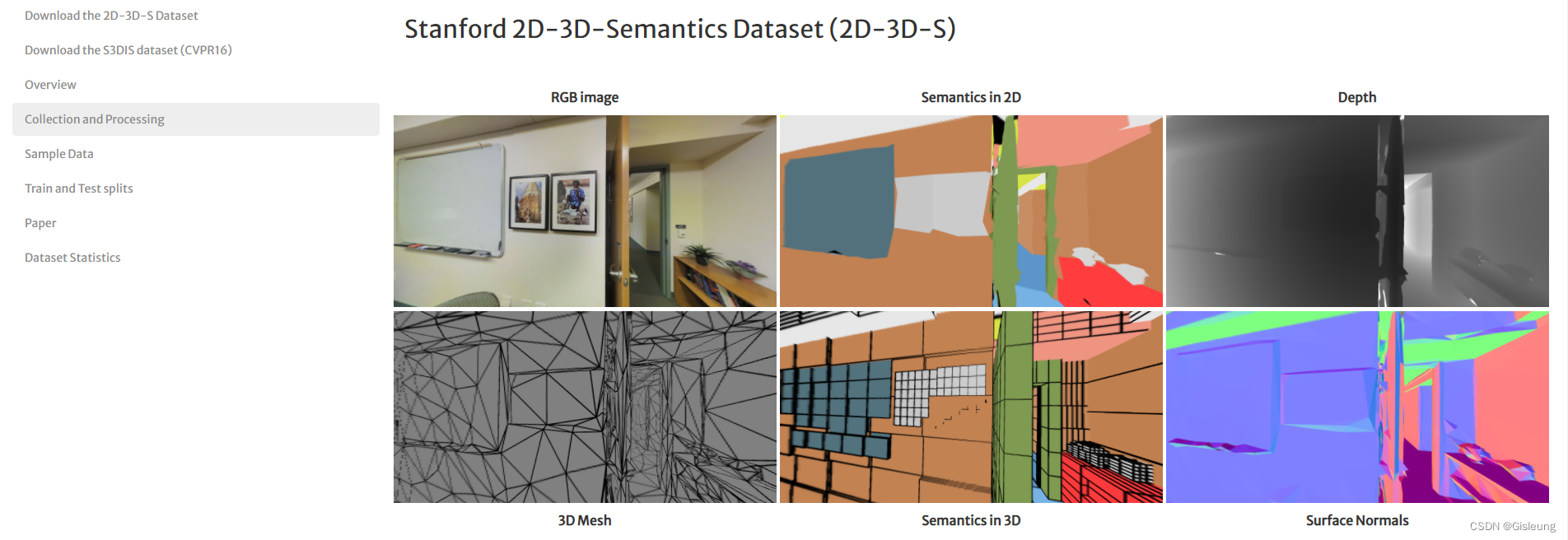
1.4 S3DIS (室内场景、语义分割)
包含数据集:
Full 2D-3D-S Dataset:S3DIS Dataset:
数据内容: 会议室、个人办公室、礼堂、休息室、开放空间、大厅、楼梯、走廊
发布单位: 斯坦福大学
下载地址: http://buildingparser.stanford.edu/dataset.html (需要登记信息)
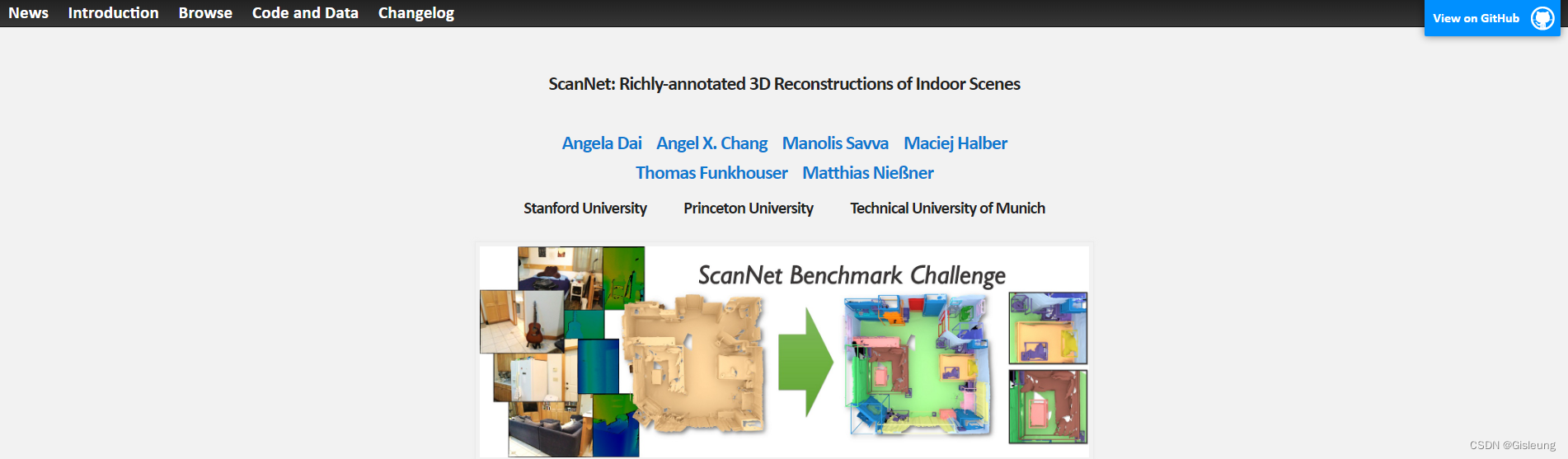
1.5 Scannet(室内场景、语义标签)
一个二维三维数据集,主要采集了室内场景的二维图像信息,包括rgb、深度,三维点云ply数据,并进行了语义标签和实例标签标注。
一共1513个采集场景数据(每个场景中点云数量都不一样,如果要用到端到端可能需要采样,使每一个场景的点都相同),共21个类别的对象,其中,1201个场景用于训练,312个场景用于测试
包含数据集:
完整数据集:子集:
数据内容: 室内场景
采集方式: RGBD摄像机得到的3维激光点云
发布单位: 斯坦福大学,普林斯顿大学,慕尼黑工业大学
下载地址: http://www.scan-net.org/#code-and-data (需要填写协议,邮件作者)
1.6 Semantic3D(室外自然场景,语义分割)
一个大型标记的3D点云数据集,其中包含自然场景,总共超过40亿个点。它还涵盖了一系列不同的城市场景:教堂,街道,铁轨,广场,村庄,足球场,城堡等等。我们提供的点云使用最先进的设备进行静态扫描,并包含非常精细的细节。
包含数据集:
semantic-8:具有8个类标签的分类基准,即{1:人造地形,2:自然地形,3:高植被,4:低植被,5:建筑物,6:硬景观,7:扫描文物,8:汽车}。附加标签 {0:未标记的点}
reduceed-8:缩减版
数据内容: 教堂,街道,铁轨,广场,村庄,足球场,城堡等室外地面扫描结果
采集方式: 室外地面扫描
发布单位: 瑞士苏黎世联邦理工学院
下载地址: http://www.semantic3d.net/ (直接下载)
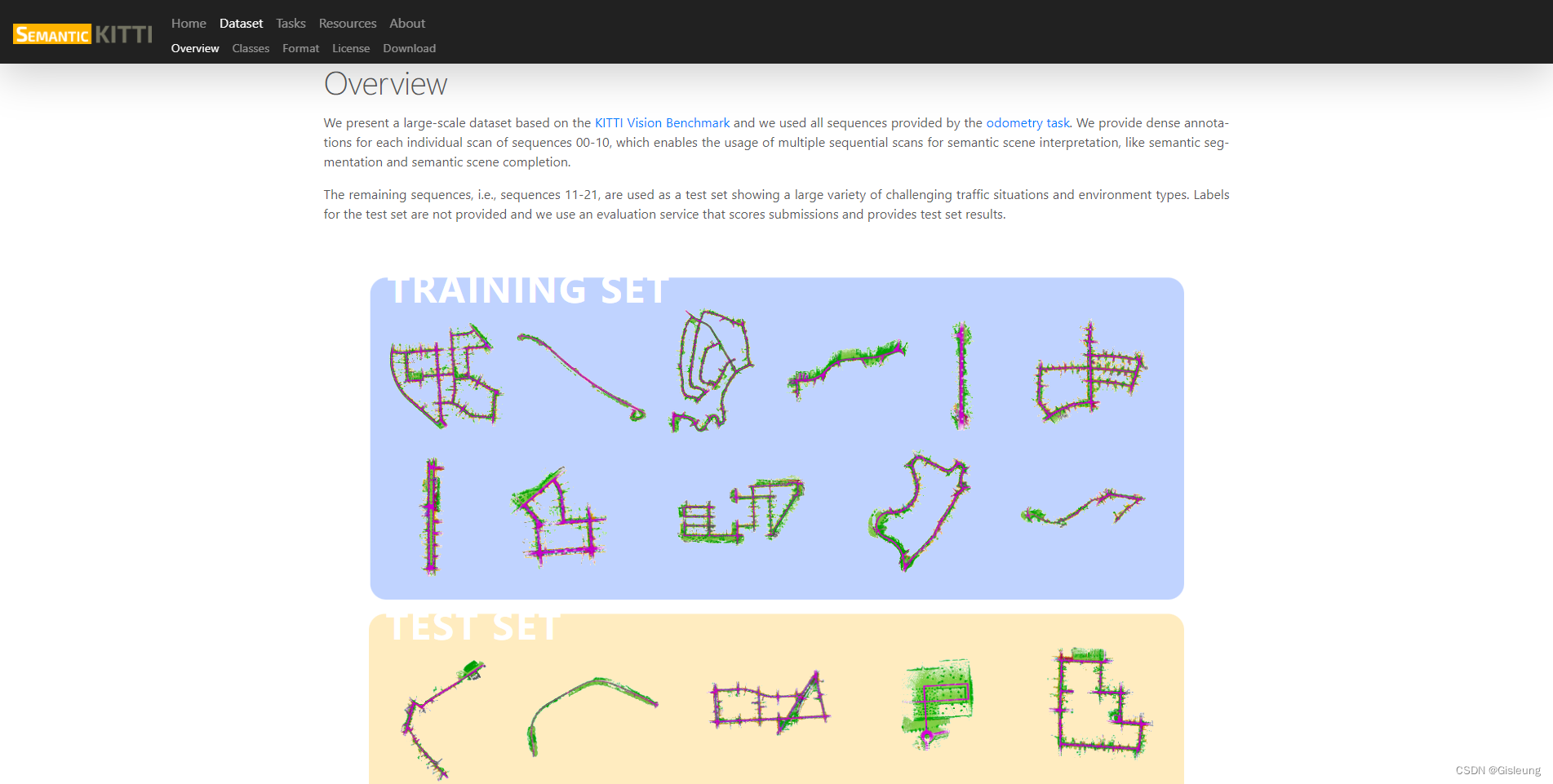
1.7 Semantic KITTI (道路点云,语义分割)
基于激光雷达序列的语义场景理解数据集,一个基于KITTI视觉基准的大规模数据集,并使用了测距任务提供的所有序列。我们为序列 00-10 的每个单独扫描提供密集注释,从而可以使用多个顺序扫描进行语义场景解释,如语义分割和语义场景完成
包含数据集:
KITTI Odometry Benchmark Velodyne point clouds:KITTI Odometry Benchmark calibration data:SemanticKITTI label data:
数据内容: 数据集包含10条完整采集轨迹,市中心的交通、住宅区,以及德国卡尔斯鲁厄周围的高速公路场景和乡村道路。共标注 28 个类,包括区分非移动对象和移动对象的类,即地面、建筑、车、人、物体等大类(内部继续细分)。
采集方式: 汽车激光雷达的全360度视场
发布单位: 波恩大学
下载地址: http://semantic-kitti.org/dataset.html (提供邮箱下载)
1.8 WHU-TLS/MLS (点云配准、语义分割、实例分割)
为推进深度学习方法在点云配准、语义分割、实例分割等领域的发展,武汉大学联合国内外多家高等院校和研究机构发布了包含多类型场景的地面站点云配准基准数据集WHU-TLS和包含语义、实例的城市级车载点云基准数据集WHU-MLS。
包含数据集:
WHU-TLS:地铁站、高铁站、山地、公园、校园、住宅、河岸、文化遗产建筑、地下矿道、隧道等WHU-MLS:地面特征,动态目标,植被,杆状地物及其附属结构,建筑和结构设以及其他公共便利设施等6大类30余小类地物要素
数据内容: 数据集涵盖了地铁站、高铁站、山地、森林、公园、校园、住宅、河岸、文化遗产建筑、地下矿道、隧道等11种不同的环境
采集方式: 地面点云、车载点云
发布单位: 武汉大学(联合其它单位)
下载地址: http://3s.whu.edu.cn/ybs/en/benchmark.htm (登记信息下载)

2 点云配准
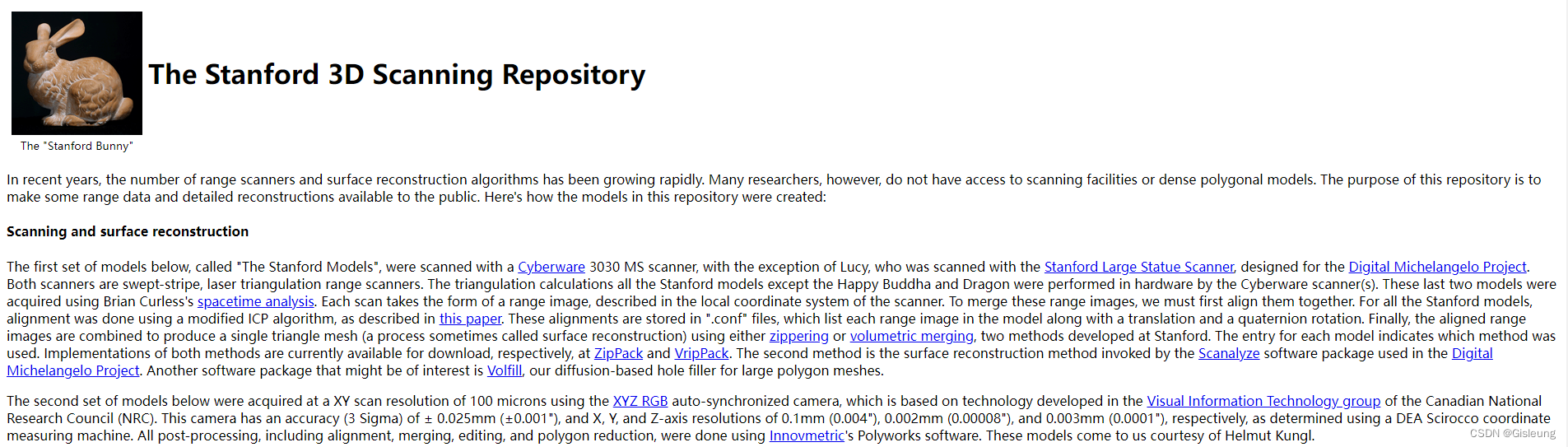
2.1 The Stanford 3D Scanning Repository (点云配准、表面重建)
包含数据: 斯坦福模型
数据内容: 兔子、龙、马、各类雕像等
采集方式: Cyberware三维扫描仪
发布单位: 斯坦福大学
下载地址: http://graphics.stanford.edu/data/3Dscanrep/
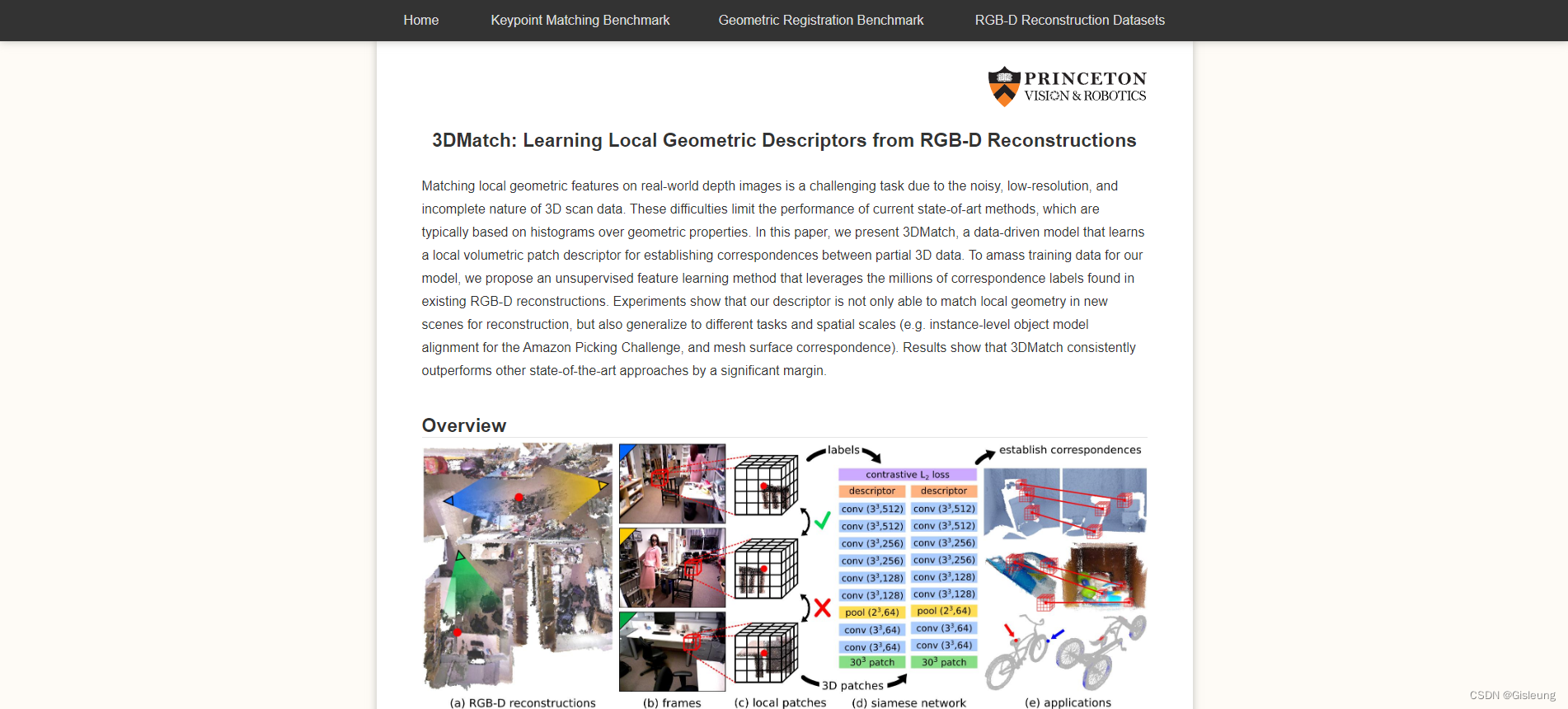
2.2 3D Match (点云配准)
3DMatch数据集收集了来⾃于62个场景的数据,其中54个场景的数据⽤于训练,8个场景的数据⽤于评估,其具体名称查看train.txt和test.txt。3DMatch数据常⽤于3D点云的关键点、特征描述⼦、点云配准等任务。
包含数据集: 7-Scenes、SUN3D 等
数据内容: 客厅、办公室、厨房、楼梯、等
采集方式: RGB-D数据生成
发布单位: 普林斯顿大学
下载地址: https://3dmatch.cs.princeton.edu/ (直接下载)
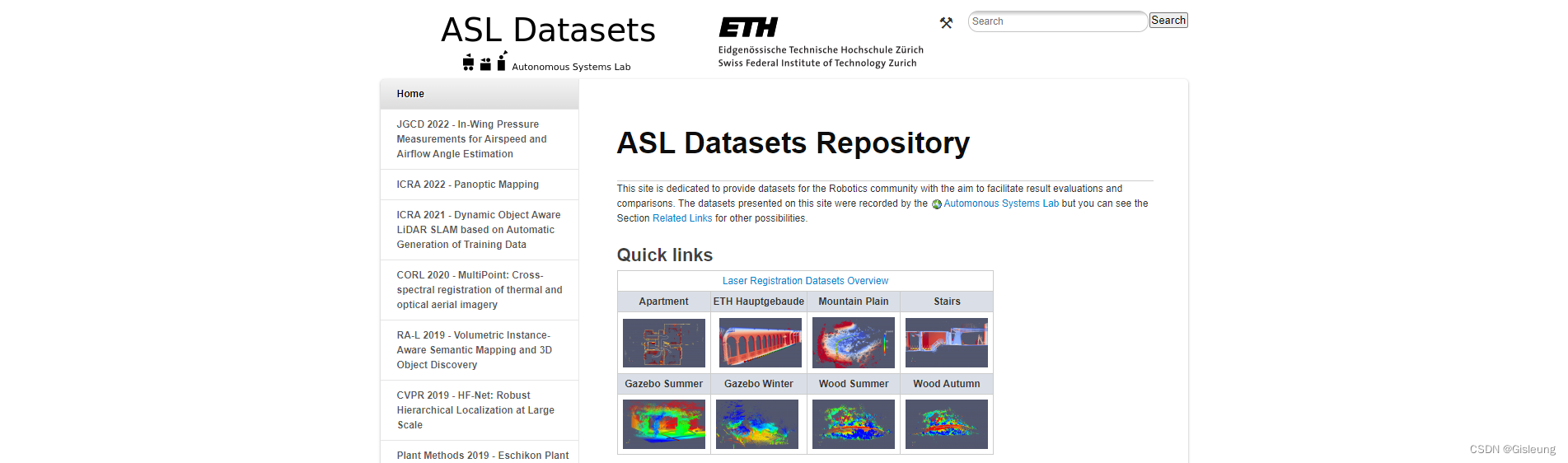
2.3 ASL Datasets Repository (点云配准、目标检测)
点云配准应用
包含数据集:
数据内容: 公寓、楼梯、山地平原、亭子、等
采集方式: Hokuyo UTM-30LX 激光扫描仪
发布单位: Autonomous Systems Lab (苏黎世联邦理工学院自治系统实验室)
下载地址: https://projects.asl.ethz.ch/datasets/doku.php (直接下载)
–
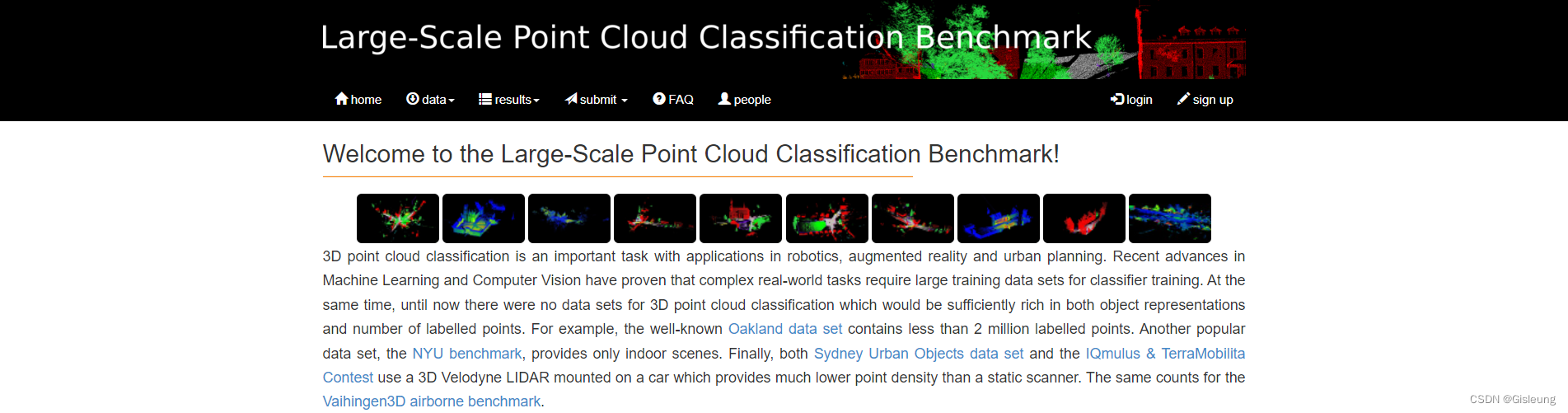
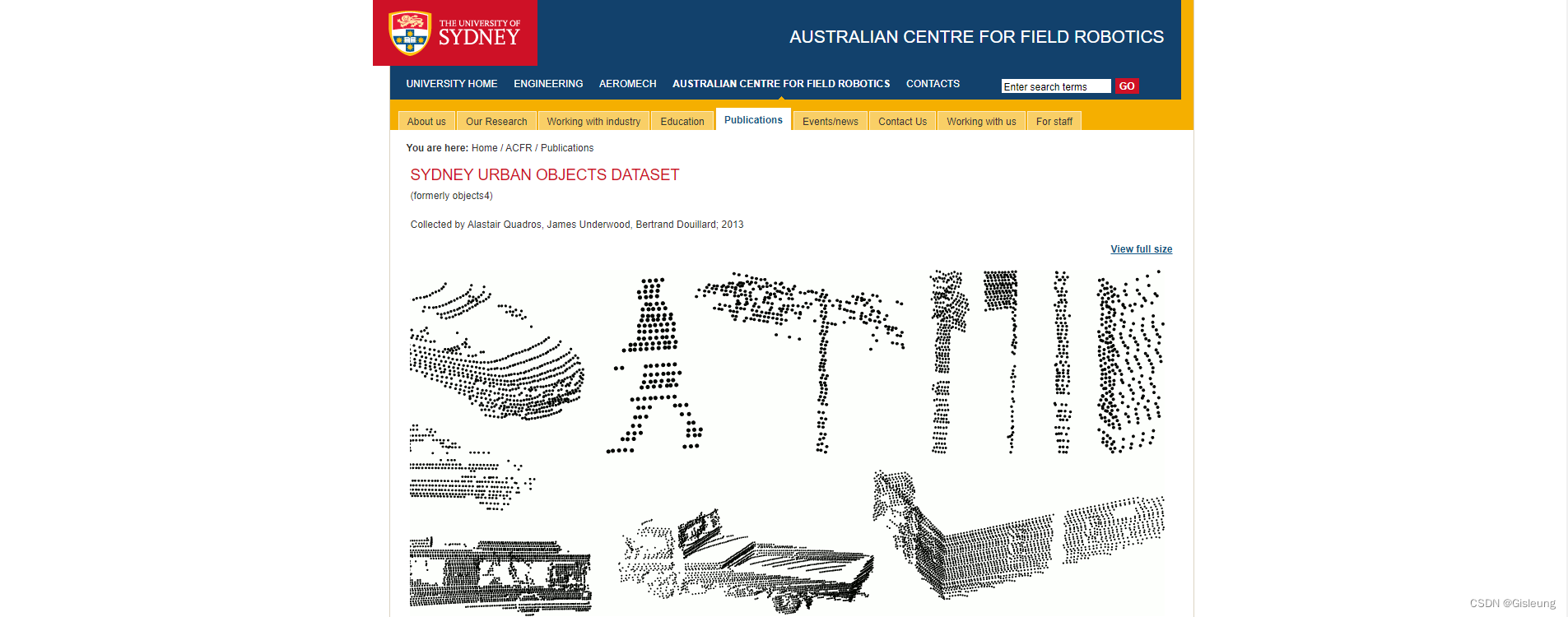
2.4 Sydney Urban Objects Dataset (点云配准、点云分类)
包含用Velodyne HDL-64E LIDAR扫描的各种常见城市道路对象,收集于澳大利亚悉尼CBD。含有631个单独的扫描物体,包括车辆、行人、广告标志和树木等,可以用来测试匹配和分类算法。
包含数据集: Sydney Urban Objects Dataset
数据内容: 城市道路对象:摩托车、汽车、行人、植被、交通标志、等
采集方式: Velodyne HDL-64E LIDAR,
发布单位: 悉尼大学
下载地址: https://www.acfr.usyd.edu.au/papers/SydneyUrbanObjectsDataset.shtml (直接下载)
2.5 WHU-TLS 数据集 (点云配准)
该基准数据集由 115 次扫描组成,从 1740 个不同环境(即地铁站、高铁站台、山脉、森林、公园、校园、住宅、河岸、文物建筑、地下挖掘和隧道)收集了超过 3.11 亿个三维点。
数据内容: 地铁站、高铁站台、山脉、森林、公园、校园、住宅、河岸、文物建筑、地下挖掘和隧道
采集方式: 地面扫描仪VZ-400、徕卡P40等设备
发布单位: 武汉大学
下载地址: https://3s.whu.edu.cn/ybs/en/benchmark.htm (登记下载)

3 目标检测(驾驶场景)
3.1 KITTI (目标检测)
是目前国际上最大的自动驾驶场景下的算法评测数据集。该数据集用于评测立体图像(stereo),光流(optical flow),视觉测距(visual odometry),3D物体检测(object detection)和3D跟踪(tracking)等计算机视觉技术在车载环境下的性能。
包含数据集: Velodyne point clouds、…
数据内容: 城市、农村、高速公路实时采集
采集方式: 车载Velodyne激光扫描仪
发布单位: 卡尔斯鲁厄理工学院、芝加哥丰田技术研究所
下载地址: http://www.cvlibs.net/datasets/kitti/ (注册账号下载)

3.2 IQmulus & TerraMobilita Contest (检测、分类、分割)
该数据库包含由3亿点组成的巴黎密集城市环境的三维MLS数据。在这个数据库中,对整个三维点云进行分割和分类,即每个点包含一个标签和一个类。因此,可用于对检测-分割-分类方法进行点向评估。
包含数据集:
Learning dataset:用于学习ten zones:用于测试
数据内容: 巴黎密集城市环境
采集方式: 车载MLS
发布单位: 法国国家测绘局
下载地址: http://data.ign.fr/benchmarks/UrbanAnalysis/# (直接下载)

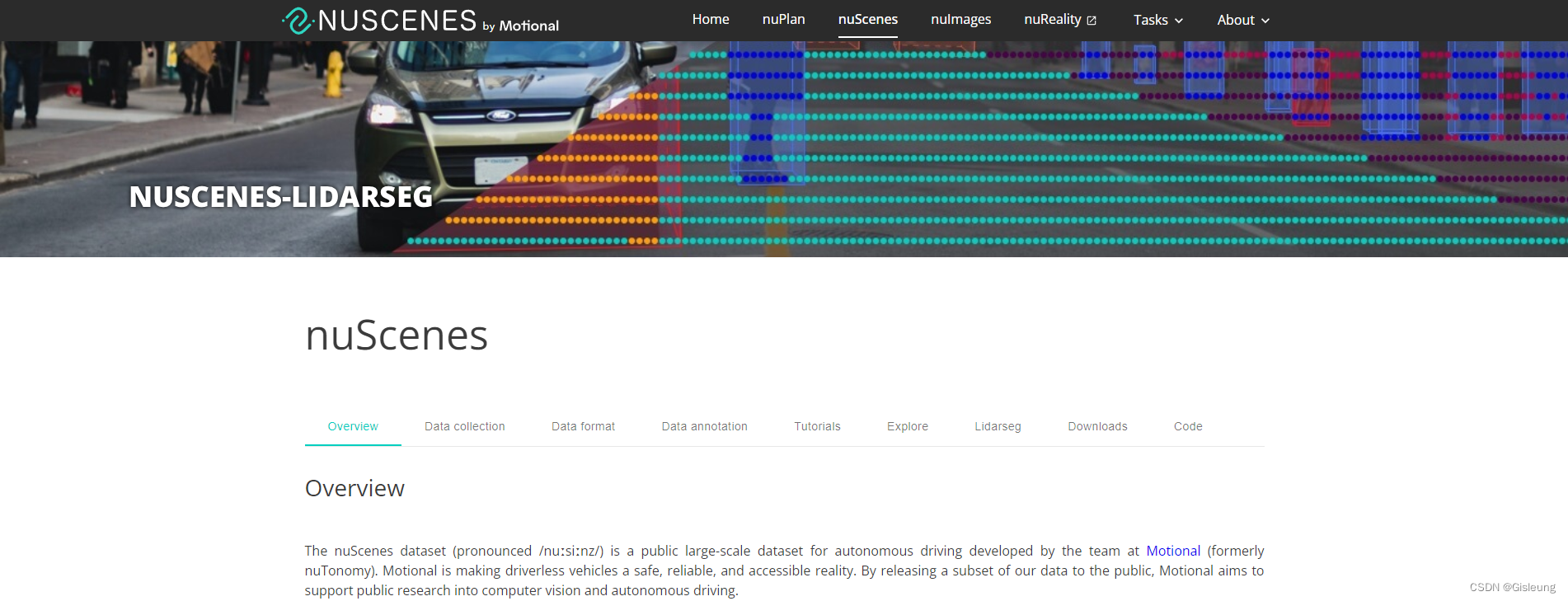
3.3 nuScenes (检测、追踪、分割)
包含所有 1000 个场景的完整 nuScenes 数据集。完整数据集包括大约 140 万张摄像机图像、39 万张激光雷达扫描、1.4 米雷达扫描和 4 万个关键帧中的 140 万个对象边界框。2020年7月,发布了nuScenes-lidarseg
包含数据集:
nuScenes:nuScenes-lidarseg:激光雷达语义分割nuScenes-panoptic:
数据内容: (波士顿和新加坡)密集的交通和极具挑战性的驾驶场景
采集方式: 6个摄像头,1个激光雷达,5个雷达,GPS,IMU
发布单位: motional
下载地址: https://www.nuscenes.org/nuscenes#data-collection(注册登录下载)
3.4 Waymo Open Dataset (检测、追踪)
数据集包含3000个驾驶片段,每一片段包含20秒的连续驾驶画面。连续镜头内容可以使得研究人员开发模型来跟踪和预测其他道路使用者的行为。数据采集的范围涵盖凤凰城、柯克兰、山景城、旧金山等地区,以及各种驾驶条件下的数据,包括白天、黑夜、黎明、黄昏、雨天和晴天。每个分段涵盖5个高分辨率Waymo激光雷达和五个前置和侧面摄像头的数据
包含数据集:
Perception Dataset:Motion Dataset:
数据内容: 包括各种时间、环境,对象和天气条件的驾驶场景
采集方式:
- 1 个中档激光雷达
- 4 个短程激光雷达
- 5 个摄像头(正面和侧面)
- 同步激光雷达和摄像头数据
- 激光雷达到摄像机投影
- 传感器校准和车辆姿势
发布单位: Waymo
下载地址: https://waymo.com/open/ (注册账号下载)
4 机载点云数据集
4.1 Vaihingen
国际摄影测量与遥感协会(ISPRS)提供的德国Vaihingen小镇3D语义标签数据集,包括机载LiDAR扫描点云和多光谱航空影像
数据内容: 机载LiDAR扫描点云、多光谱航空影像
发布单位: 国际摄影测量与遥感协会(ISPRS)
下载地址: https://www.isprs.org/education/benchmarks/UrbanSemLab/default.aspx (可直接下载)

4.2 DublinCity
都柏林大学学院(UCD)的城市建模小组通过ALS设备扫描了都柏林市中心的主要区域(即约5.6公里,包括部分覆盖的区域),该设备于2015年由直升机搭载并开展扫描。然而,实际的聚焦区域约为2 km^2,其中包含最密集的LiDAR点云和影像数据集。飞行高度大多在300米左右,总行程在41条飞行路径中进行。
包含数据:
- T_315500_234500_NE.bin
- …
- T_316500_234000_SW_T_316500_233500_NW.bin
数据内容: 机载LiDAR扫描点云,详细标注,精细标注。(精细到连建筑物的窗户都进行了单独标注,在下载地址中有详细介绍)

发布单位: 都柏林大学学院
下载地址: https://v-sense.scss.tcd.ie/DublinCity/ (可直接下载)
4.3 武汉大学
待补充
4.4 RoofN3D
美国地质调查局 (USGS) 提供纽约的机载 LiDAR 点云,主要用于建筑物重建(深度学习)。
包含数据集:
RoofN3D:
数据内容: 共包含了118074个建筑物点云数据,被标记为三种屋顶类型分别是双坡型、四角攒尖型和四坡型。
发布单位: 美国地质调查局 (USGS)
下载地址: https://roofn3d.gis.tu-berlin.de/ (可直接下载)
4.5 DALES
代顿注释LiDAR地球扫描(Dayton Annotated LiDAR Earth Scan, DALES)数据集,这是一个大规模航空LiDAR数据集,其中包含超过5亿个手动标记点,跨越10平方公里的面积和八个对象类别。
包含数据集:
DALES:包含语义分割标签的原始数据集。DALESObjects:包含语义标签、实例标签和强度数据的第二个版本。
数据内容: 数据集预分为29个训练文件和11个测试文件,分为以下几类:地面(1)、植被(2)、汽车(3)、卡车(4)、电力线(5)、围栏(6)、电线杆(7)和建筑物(8)
发布单位: 戴顿大学(University of Dayton)
下载地址: https://udayton.edu/engineering/research/centers/vision_lab/research/was_data_analysis_and_processing/dale.php (登记信息下载)
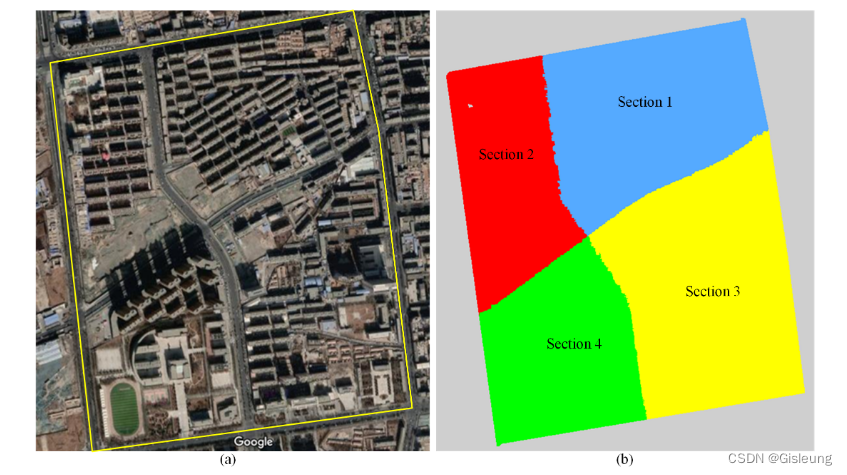
4.6 LASDU
通过一架飞行高度约为 1200 m 的飞机上的 Leica ALS70 系统获得。平均点密度约为3~4 pts/m^2,垂直精度范围在5~30 cm之间。带注释的数据集覆盖了约 1 km × 1 km 的城市区域,拥有高度密集的住宅和工业建筑
数据内容:
• 标签1:地面(颜色代码:#AFAFAF):人造地面、道路、裸地。
• 标签2:建筑物(颜色代码:#00007F):建筑物。
• 标签3:树木(颜色代码:#09781A):高大和低矮的树木。
• 标签4:低植被(颜色代码:#AAFF7F):灌木、草地、花坛。
• 标签5:人工制品(颜色代码:#FF5500):墙壁、栅栏、灯杆、车辆和其他人造物体。
• 标签0:未分类(颜色代码:#000000):噪波、异常值和未标记点。
发布单位: 同济大学测绘与地理信息学院; 慕尼黑工业大学摄影测量与遥感学院
下载地址: https://github.com/Yusheng-Xu/LASDU-Semantic-Labeling-Benchmark(联系下载)
建议使用 Section2 和Section3 作为训练数据,使用 Section1 和 Section4 作为语义标记任务的测试数据。
4.7 DFC2019
2019年数据融合竞赛由IEEE地球科学与遥感学会等单位主办的赛事,其中3D点云分类挑战赛作为其中一个项目,并提供了公开基准数据集。
点云文件为txt格式, {x, y, z, intensity, return number} ,标签数据单独存储。
以划分好训练集、验证集、测试集。
数据内容:
5个类别:地面、高植被、建筑物、水和桥面
发布单位: IEEE地球科学与遥感学会等
下载地址: https://ieee-dataport.org/open-access/data-fusion-contest-2019-dfc2019 (注册登录下载)

4.8 Hessigheim 3D(H3D)
数据内容: 在四个不同时期捕获的高密度LiDAR点云(多时态数据集);手动标记为 11 个类别;800 点/平方米的高密度 LiDAR 数据。
发布单位: 斯图加特大学, 德国
下载地址: https://ifpwww.ifp.uni-stuttgart.de/benchmark/hessigheim/default.aspx(注册下载)
5 车载点云数据集
5.1 Paris-Lille-3D
6 地面站点云数据集
6.1 Semantic3D
7 航空摄影点云
即从航空摄影、倾斜摄影中匹配出的点云数据
7.1 Urban3D
13个语义类,通过点云标记工具标记所有3D点,且所有标签均经过人工交叉检查,保证了一致性和高品质。
包含数据集:
Urban3D:
数据内容: 地面、植被、建筑物、墙体、桥梁、停车场、铁路、交通道路、街道设施、汽车、人行道、自行车、水
采集方式: 固定翼无人机Ebee X
发布单位: (文章作者是牛津大学)
下载地址: http://point-cloud-analysis.cs.ox.ac.uk/ (登记信息下载)官方对中国玩家很友好,甚至提供了百度网盘下载地址。

7.2 Swiss3DCities
室外城市(瑞士)三维点云数据集,总面积为2.7 km2。点云均匀致密且完整,并且对不同的应用非常有用,包括自动驾驶,游戏,智能城市规划和机器人技术。
包含数据集:
Swiss3DCities:
数据内容: 城市三维点云数据集
采集方式: 摄影测量方法从航空影像中构建
发布单位: Nomoko AG
下载地址: https://zenodo.org/record/4390295#.Y0eIodJBxuV(申请下载)
参考(更多资源):
智能推荐
娱乐百分百-20090316 冰淇淋少女组 - 生活至上,美容至尚!-程序员宅基地
文章浏览阅读39次。转载于:https://www.cnblogs.com/lixyvip/archive/2010/01/13/1646110.html
C语言笔记 -- 结构体成员前加 . 点_结构体成员前面加点-程序员宅基地
文章浏览阅读4.8k次,点赞24次,收藏46次。加 “.”的话可以不考虑赋值顺序,表示在这个结构体中选择这个变量来赋值,所以可以不考虑结构体中变量的顺序_结构体成员前面加点
【实用篇】SpringCloud+RabbitMQ+Docker+Redis+搜索+分布式,系统详解springcloud分布式_springcloud + ribbitmq + docker + rebis-程序员宅基地
文章浏览阅读971次,点赞3次,收藏16次。配置文件方式:在order-service的application.yml文件中,添加新的配置也可以修改规则(针对某个服务的负载均衡策略)user-service: # 给某个微服务配置负载均衡规则,这里是user-service服务ribbon:NFLoadBalancerRuleClassName: com.netflix.loadbalancer.RandomRule # 负载均衡规则1. Feign可以支持很多的自定义配置。_springcloud + ribbitmq + docker + rebis
pandas 统计数据频率函数value_counts及重复值和其他统计函数_pandas count_value-程序员宅基地
文章浏览阅读7.1k次。当统计一个数据集里数据出现的频率,次数可以使用value_countvalue_counts默认参数如下:value_counts(values, sort=True, ascending=False, normalize=False, bins=None, dropna=True)对于Series类型的数据data.value_counts()对于DataFrame类型的数据dat..._pandas count_value
R语言学习(三)——决策树分类_id3算法的数据包是哪个rpart-程序员宅基地
文章浏览阅读1.5w次,点赞11次,收藏94次。分类分类(Classification)任务就是通过学习获得一个目标函数(Target Function)f, 将每个属性集x映射到一个预先定义好的类标号y。分类任务的输入数据是记录的集合,每条记录也称为实例或者样例。用元组(X,y)表示,其中,X 是属性集合,y是一个特殊的属性,指出样例的类标号(也称为分类属性或者目标属性)。解决分类问题的一般方法分类技术是一种根据输入数据集建立分类模型..._id3算法的数据包是哪个rpart
LNMP(Nginx服务,MySQL 服务,安装PHP服务 手动安装技术文档)-程序员宅基地
文章浏览阅读64次。此文转载自:https://blog.csdn.net/weixin_51622156/article/details/112528435文章目录安装Nginx服务1、关闭防火墙将nginx所需软件包到/opt目录下2、安装依赖包3、 创建运行用户4、编译安装5.优化路径6、添加 Nginx 系统服务二、安装 MySQL 服务1、安装Mysql环境依赖包2、创建运行用户...
随便推点
dvi接口引脚定义_DVI、D系列端子插口针脚定义-程序员宅基地
文章浏览阅读1.9k次。P: 2009-05-10 23:35:263DVI D系列端子插口针脚定义,“WORD-BREAK处理方式:break-all幅度高达140%”,就像如果人们参加赛马[/ align >英文简介:插头,连接器———插头端子>,< /处理起来:“WORD-BREAK风格,就像如果人们参加赛马break-all幅度高达140%”[/ align >,D型端子EIAJ五D-c..._dvi接口音频针脚
android pay和hce区别,对比Apple Pay与安卓HCE的信令技术-程序员宅基地
文章浏览阅读683次。Apple Pay的发布,让从事安卓NFC应用开发者兴奋了一把,苹果对NFC的支持必将推动整个产业的发展,然而Apple Pay与安卓系统上的NFC支付有什么区别呢?特别是安卓系统上的HCE技术。近日,著名HCE方案商SimplyTapp CEO Doug Yeager就在博客中发表了文章,对比Apple Pay与HCE。博客对信令技术进行了简单的介绍,他认为“一个信令可以理解成一个证书的生命”,..._hce nfc apdu unionpay
主流硬盘编号识别完全攻略篇-程序员宅基地
文章浏览阅读448次。在我们购买的PC中,硬盘并不占其太多价格比例,然而,硬盘在电脑中充当着存储数据的角色,众所周知的是数据本身的价值与重要性是无法衡量的,因此硬盘便成为了电脑中的核心配件。 在竞争激烈的今天,硬盘市场分别由“希捷(Seagate),日立(HITACHI),迈拓(Maxtor),西部数据(Western Digital)和三星(Samsung)”等5家厂商所瓜分..._戴尔硬盘字母数字识别
洛谷P2330 [SCOI2005]繁忙的都市-程序员宅基地
文章浏览阅读297次。题目描述城市C是一个非常繁忙的大都市,城市中的道路十分的拥挤,于是市长决定对其中的道路进行改造。城市C的道路是这样分布的:城市中有n个交叉路口,有些交叉路口之间有道路相连,两个交叉路口之间最多有一条道路相连接。这些道路是双向的,且把所有的交叉路口直接或间接的连接起来了。每条道路都有一个分值,分值越小表示这个道路越繁忙,越需要进行改造。但是市政府的资金有限,市长希望进行改造的道路越少越好,于是他
2021-11-22 WinFrom面试题 如何在Form加载时,动态添加控件到Form中?_.net 怎么将自定义控件放到form中-程序员宅基地
文章浏览阅读3.2w次。这里以Label为例说明。在Form1的加载加载中:private void Form1_Load(object sender, EventArgs e){Label label1=new Label(){Text=“欢迎来到这里!!!”,ForeColor = System.Drawing.Color.Red,Name=”label1”,AutoSize=true,Location=new System.Drawing.Point(48, 37);};this.Controls.A_.net 怎么将自定义控件放到form中
Endnote使用——与WPS关联_endnotex8与wps-程序员宅基地
文章浏览阅读5.3w次,点赞39次,收藏79次。Endnote使用——与WPS关联1. 自动关联2. 手动关联我使用的是Endnote X8汉化版,在经历过反复重新安装包括关机重启之后,Endnote X8也没有自动和WPS关联,上网百度了很多办法,都没有用……过了很久,我终于弄好了。现记录一下过程。1. 自动关联我们需要下载安装最新版的WPS Office 2019,以及安装EndNote到电脑本地。这个时候,打开WPS文档,会发现菜单栏里已经有了EndNote X8的标识,说明软件已自动关联了。2. 手动关联如果软件下载或重新安装之后,未_endnotex8与wps