粒子群优化算法(PSO)-程序员宅基地
先简单介绍一下粒子群优化算法(Particle Swarm Optimization),后边会介绍一些改进的粒子群算法。
1.背景知识
受到鸟群觅食行为的启发(鸟群觅食,通过信息共享使种群找到最优的觅食点),由社会心理学家JamesKennedy和电气工程师RussellEberhart于1995年提出,用于解决科学工程领域的非线性,非凸性,组合优化问题;在函数优化,图像处理也有广泛的应用。
粒子群优化算法是一种基于数值的优化算法,粒子群优化算法的基础是“信息共享”。具有收敛速度快,参数少,算法简单易于实现的优点(对于高维度比遗传算法更快)。存在早熟收敛,维数灾难,陷入局部最优的问题。
场景,一群鸟随机搜寻食物,一片森林只有一块地方有食物,所有鸟都不知道食物在哪里,只知道自己和其他鸟距离食物的位置,寻找食物的策略就是所有鸟寻找当前距离食物最近的鸟。
粒子群优化算法的相关发展方向:
- 调整PSO的参数来平衡算法算法的全局探索和局部开采能力
- 设计不同类型的拓扑结构,改变粒子学习模式,从而提高种群多样性
- 将PSO与其他优化算法结合,形成混合PSO算法
- 采用小生境技术。小生境是模拟生态平衡的一种仿生技术,适用于多峰函数和多目标函数的优化问题
2.粒子群优化算法思想
用粒子来描述鸟类个体,每个粒子在搜索空间中搜索,飞行过程为搜索过程,飞行速度可以根据粒子历史最优位置和种群历史最优位置动态调整,粒子当前位置就是对应优化问题的一个候选解 ,称为个体极值,粒子群中的最优的个体极值称为全局最优解。不断地迭代,粒子更新速度和我位置,最终满足条件的全局最优解即为所求目标。
| 鸟群觅食 | 粒子群算法 |
| 鸟 | 粒子 |
| 森林 | 求解空间 |
| 食物的量 | 目标函数值(适应值) |
| 每只鸟所在位置 | 空间中的一个解(粒子位置) |
| 食物量最多的位置 | 全局最优解 |
3.粒子群优化算法流程

MATLAB伪代码
FOR each particle(粒子) i
FOR each dimension(维度) d
初始化粒子位置 Xid 为允许的随机数
初始化粒子速度 Vid 为允许的随机数
END FOR
END FOR
Iteration k=1 %迭代次数
DO
% 找到每个粒子的最优适应值
FOR each particle i
计算适应值
IF 这个适应值比历史的最优适应值好
SET 当前的适应值为最优的适应值
END IF
END FOR
挑选出最优适应值的粒子就是当前迭代次数的群体最优值
FOR each particle i
FOR each dimension d
计算更新粒子速度 % 速度更新公式
计算更新位置 % 位置更新公式
END FOR
END FOR
k=k+1
While 当满足最大迭代次数或者两次迭代之间的适应值误差满足目标时停止迭代 (1)初始化:设置最大迭代次数,目标函数的自变量个数,粒子的最大速度,位置信息为整个搜索空间,我们在速度区间和搜索空间上随机初始化速度和位置,设置粒子群规模为N,每个粒子随机初始化一个飞翔速度。
假设在D维空间中:
- 第i个粒子的位置为: Xid=(xi1,xi2,.xiD)
- 第i个粒子的速度(粒子移动的方向)为: Vid=(vi1,vi2,.viD)
- 第i个粒子搜索到的最优位置(个体最优解)为: Pid,pbest=(pi1,pi2,.piD),其中p指的是Particle(粒子)
- 群体中搜索到的最优位置(群体最优解)为: Pid,gbest=(p1,gbest, p2,gbest,...pD,gbest), 其中g指的是Group(群体)
- 第i个粒子搜索到的最优位置的适应值(优化目标函数的值)为: fp——个体历史最优适应值
- 群体中搜索到的最优位置的适应值为: fg——群体历史最优适应值
其他参数:
- 给所有粒子限制位置:

- 给所有粒子限制速度:

- 设置迭代次数iter
- 设置粒子们自我学习因子C1,调节粒子移动步长受自我影响的因素大小
- 设置粒子们群体学习因子C2,调节粒子移动步长受群体影响的因素大小
- 设置粒子们惯性权重为W,非负,体现继承上一刻自己速度的能力
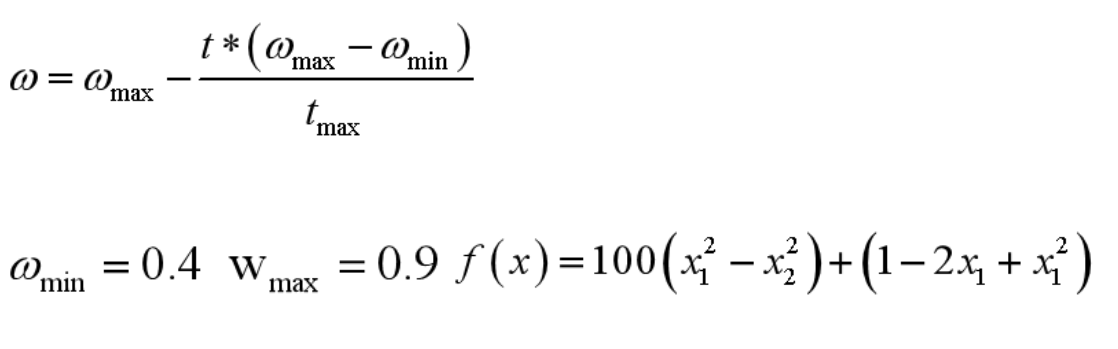
(2)定义适应度函数
即需要优化的目标函数
(3)更新速度公式

说明:
- 惯性权重:由惯性权重和粒子自身速度构成,表示粒子对先前自身运动状态的信任。
- 认知部分:表示粒子本身的思考,即粒子自己经验的部分,可理解为粒子当前位置与自身历史最优位置之间的距离和方向。
- 社会部分:表示粒子之间的信息共享与合作,即来源于群体中其他优秀粒子的经验,可理解为粒子当前位置与群体历史最优位置之间的距离和方向。
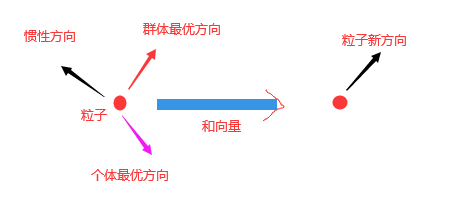
速度方向更新示意图
公式定义参考:
- N--粒子规模;i--粒子序号,i=1,2,..N;
- D--粒子维度;d--粒子维度序号,d=1,2,..D;
- k--迭代次数;w--惯性因子;c1--个体学习因子;c2--群体学习因子;
- r1,r2--区间 [0-1] 的随机数,增加搜索的随机性
 --粒子 i 在第 k 次迭代中第 d 维的速度向量
--粒子 i 在第 k 次迭代中第 d 维的速度向量 --粒子 i 在第 k 次迭代中第 d 维的位置向量
--粒子 i 在第 k 次迭代中第 d 维的位置向量 --粒子 i 在第 k 次迭代中第 d 维的历史最优位置,即在第 k 次迭代后,第 i 个粒子(个体)搜索得到的最优解;
--粒子 i 在第 k 次迭代中第 d 维的历史最优位置,即在第 k 次迭代后,第 i 个粒子(个体)搜索得到的最优解; --群体在第 k 次迭代中第 d 维的历史最优位置,即在第 k 次迭代后,整个粒子群体中的最优解。
--群体在第 k 次迭代中第 d 维的历史最优位置,即在第 k 次迭代后,整个粒子群体中的最优解。
(4)更新位置公式

(5)终止条件
- 达到设定的迭代次数
- 代数之间差值满足最小界限(精度达到要求)
(6)算法参数解释
粒子群规模N:推荐取值范围 [20-1000] ,简单问题取20-40;较难问题取100-200。较小的种群规模容易陷入局部最优,较大的会提高收敛性(迭代计算量大),种群规模达到一定水平,再增大不会再有显著作用。
粒子维度D:粒子搜索的空间维度数(自变量的个数)
迭代次数K:推荐取值 [50-100] ,典型取值60,70,100,迭代次数太小解不稳定,太大浪费资源,没必要。
惯性因子(惯性权重):w 值较大,全局寻优能力强。参数意义:使粒子保持运动惯性,使其有搜索扩展空间的趋势, w 越大,探索新的区域的能力越强。也表示粒子对当前自身运动状态的信任,依据自身的速度进行惯性运动。 较大的 w 有利于跳出局部极值,而较小的 w 有利于算法收敛。大惯性权重有利于全局搜索,不至于陷入局部最优,小惯性权重有利于在局部搜索,可以快速收敛得到最优解。推荐取值 [0.4-2],典型取值0.9, 1.2, 1.5,1.8
- w=1,基本粒子群算法
- w=0,失去对粒子自身经验的思考
改善w:解决实际优化问题时,往往希望先采用全局搜索,使搜索空间快速收敛于某一区域,然后采用局部精细化搜索获得高精度的解。提出了自适应调整的策略,即随着迭代次数,线性的减小 w 的值。常用方法:线性变化策略:随着迭代次数的增加,惯性权重 w 不断减,从而使得粒子群算法在初期具有较强的全局收敛能力,在后期具有较强的局部收敛能力。

学习因子C1,C2:也称为加速系数或加速因子
- c1 表示粒子下一步动作来源于自己经验部分所占的比重
- c2 表示粒子下一步动作来源于其他粒子所占的比重
- c1 表示将粒子推向个体最优位置Pid,pbest 的加速权重
- c2 表示将粒子推向群体最优位置 的加速权重
- 学习因子较小,使粒子在目标区域外徘徊,而高的值导致粒子越过目标区域
- c1=0, 无私型粒子群算法,迅速丧失群体多样性,易陷入局部最优而无法跳出
- c2=0, 自我认知型粒子群算法,完全没有信息的社会共享,导致算法收敛速度缓慢
- c1,c2不为0,完全型粒子群算法,保持收敛速度和全局搜索效果的均衡
- 推荐取值 [0-4] ,典型取值c1=c2=2;c1=1.6,c2=1.8; c1=1.6,c2=2; 试凑法
(7)粒子群算法的一些技巧
适应值:即优化目标函数的值,用来评价粒子位置的好坏程度,决定是否更新粒子个体的历史最优位置和群体的历史最优位置,保证粒子朝着最优解的方向搜索。
位置限制:限制粒子搜索的空间,即自变量的取值范围,对于无约束问题此处可以省略。
速度限制:为了平衡算法探索能力与开发能力,需要设定一个合理的速度范围,限制粒子的最大速度。粒子飞行速度快,探索能力强,但粒子容易飞过最优解。粒子飞行速度快。飞行速度慢,开发能力强,但是收敛速度慢,且容易陷入局部最优解。一般设为每维变量变化范围的10%~20%。
初始化:如果粒子的初始化范围选择得好的话可以缩短优化的收敛时间,需要根据具体的问题进行分析。如果根据经验判断出最优解一定在某个范围内,则就在这个范围内初始化粒子;如果无法确定,则以粒子的取值边界作为初始化范围。
算法代码
1.一维
clc;
clear;
close all;
f= @(x) - (x - 10) .^ 2 + x .* sin(x) .* cos(2 * x) - 5 * x .* sin(3 * x) ; % 适应度函数表达式(求这个函数的最大值)
figure(1);
fplot(f, [0 20], 'b-'); % 画出初始图像
d = 1; % 空间维数(该例子是1维)
N = 15; % 初始种群个数
x_limit = [0, 20]; % 设置位置限制
v_limit = [-1, 1]; % 设置速度限制
x = x_limit(1) + (x_limit(2) - x_limit(1)) * rand(N, d); %初始每个粒子的位置
v = rand(N, d); % 初始每个粒子的速度
pbest = x; % 初始化每个个体的历史最佳位置
gbest = zeros(1, d); % 初始化种群的历史最佳位置 ,创建全0数组
fp_best = zeros(N, 1); % 初始化每个个体的历史最佳适应度 为 0
fg_best = -inf; % 初始化种群历史最佳适应度 为 负无穷
iter = 50; % 最大迭代次数
c1 = 1.6; % 自我学习因子
c2 = 1.8; % 群体学习因子
w=0.4; % 惯性学习因子
hold on;
plot(x, f(x), 'ro');
title('初始状态图');
record = zeros(iter, 1); % 记录器(用于记录 fg_best 的变化过程)
figure(2);
i = 1;
while i <= iter
fx = f(x) ; % 计算个体当前适应度
% 个体寻优
for j = 1:N
if fp_best(j) < fx(j) % 第j个个体的历史(最优)适应度小于当前的适应度则更新
fp_best(j) = fx(j); % 更新个体历史最佳适应度
pbest(j) = x(j); % 更新个体历史最佳位置
end
end
% 群体寻优
if fg_best < max(fp_best) % 第i次迭代,种群历史最优适应值,小于当前迭代次数的群体最优适应值则更新
[fg_best,ind_max] = max(fp_best); % 更新群体历史最佳适应度
gbest = pbest(ind_max); % 更新群体历史最佳位置,其中 ind_max 是最大值所在的下标
% 注:将上面的两个式子换成下面两个是不可以的
% [gbest, ind_max] = max(pbest); % 更新群体历史最佳位置,其中 ind_max 是最大值所在的下标
% fg_best = fp_best(ind_max); % 更新群体历史最佳适应度
end
v = v * w + c1 * rand() * (pbest - x) + c2 * rand() * (repmat(gbest, N, 1) - x); % 速度更新
% 注: repmat(A,r1,r2):可将矩阵 扩充 为每个单位为A的r1*r2的矩阵
% 边界速度处理
v(v > v_limit(2)) = v_limit(2);
v(v < v_limit(1)) = v_limit(1);
x = x + v;% 位置更新
% 边界位置处理
x(x > x_limit(2)) = x_limit(2);
x(x < x_limit(1)) = x_limit(1);
record(i) = fg_best;%最大值记录
% 画动态展示图
zuo_x = 0 : 0.01 : 20;
plot(zuo_x, f(zuo_x), 'b-', x, f(x), 'ro');
title('状态位置变化')
pause(0.1)
i = i + 1;
% if mod(i,10) == 0 % 显示进度
% i
% end
end
figure(3);
plot(record);
title('收敛过程');
zuo_x = 0 : 0.01 : 20;
figure(4);
plot(zuo_x, f(zuo_x), 'b-', x, f(x), 'ro');
title('最终状态图')
disp(['最佳适应度:',num2str(fg_best)]);
disp(['最佳粒子的位置x:',num2str(gbest)]); 2.二维
% 主调用函数,以下新建一个文件,命名为f_xy
% function z = f_xy(x, y)
% % 适应度函数
% z = - x.^2 - y.^2 + 10*cos(2*pi*x) + 10*cos(2*pi*y) + 100;
% end
clc;
clear;
close all;
[ZuoBiao_x, ZuoBiao_y] = meshgrid(-10:0.1:10,-5:0.1:5); % 产生二维坐标
ZuoBiao_z = f_xy(ZuoBiao_x, ZuoBiao_y);
figure(1);
s = mesh(ZuoBiao_x, ZuoBiao_y, ZuoBiao_z); % 画网格曲面图
s.FaceColor = 'flat'; % 修改网格图的属性
% 初始化种群
N = 100; % 初始种群个数
D = 2; % 空间维数
iter = 50; % 迭代次数
x_limit = [-10, 10; -5, 5]; % 位置限制
v_limit = [ -2, 2; -1, 1]; % 速度限制
x = zeros(N, D);
for i = 1:D
x(:,i) = x_limit(i, 1) + (x_limit(i, 2) - x_limit(i, 1)) * rand(N, 1);%初始种群的位置
end
v(:,1) = rands(N, 1) * 1; % 初始种群x方向的速度
v(:,2) = rands(N, 1) * 2; % 初始种群y方向的速度
p_best = x; % (初始化)每个个体的历史最佳位置
f_best = zeros(1, D); % (初始化)种群的历史最佳位置
fp_best = zeros(N, 1) - inf; % (初始化)每个个体的历史最佳适应度为负无穷
fg_best = -inf; % (初始化)种群历史最佳适应度为负无穷
w = 0.8; % 惯性权重
c1 = 0.5; % 自我学习因子
c2 = 0.5; % 群体学习因子
figure(2);
s = mesh(ZuoBiao_x, ZuoBiao_y, ZuoBiao_z); % 画网格曲面图
s.FaceColor = 'flat'; % 修改网格图的属性
hold on;
plot3(x(:,1), x(:,2),f_xy(x(:,1), x(:,2)), 'ro');
title('初始状态图');
figure(3);
i = 1;
record = zeros(iter, 1); % 记录器
while i <= iter
fx = f_xy(x(:,1), x(:,2)); % 个体当前适应度
for j = 1:N
if fp_best(j) < fx(j) % 记录最大值
fp_best(j) = fx(j); % 更新个体历史最佳适应度
p_best(j,:) = x(j,:); % 更新个体历史最佳位置
end
end
if fg_best < max(fp_best)
[fg_best, ind_max] = max(fp_best); % 更新群体历史最佳适应度
f_best = p_best(ind_max, :); % 更新群体历史最佳位置
end
v = v * w + c1 * rand() * (p_best - x) + c2 * rand() * (repmat(f_best, N, 1) - x); % 速度更新
% 速度处理
for t=1:N
for k=1:D
if v(t,k) > v_limit(k,2) % 超速处理
v(t,k) = v_limit(k,2);
elseif v(t,k) < v_limit(k,1) % 慢速处理
v(t,k) = v_limit(k,1);
end
end
end
x = x + v; % 位置更新
% 边界处理
for t=1:N
for k=1:D
if x(t,k) > x_limit(k,2) % 超过边界上限
x(t,k) = x_limit(k,2);
elseif x(t,k) < x_limit(k,1) % 超过边界下限
x(t,k) = x_limit(k,1);
end
end
end
record(i) = fg_best; % 最大值记录
i = i + 1;
if mod(i,10) == 0
i % 收敛进度输出
end
pause(0.1)
end
figure(4)
plot(record);
title('收敛过程');
% 画最终状态图
figure(5);
[ZuoBiao_x, ZuoBiao_y] = meshgrid(-10:0.1:10,-5:0.1:5); % 产生二维坐标
s = mesh(ZuoBiao_x, ZuoBiao_y, ZuoBiao_z); % 画网格曲面图
s.FaceColor = 'flat'; % 修改网格图的属性
hold on;
scatter3(x(:,1), x(:,2), f_xy(x(:,1), x(:,2)), 'ro');
title('最终状态图')
disp(['最大值:',num2str(fg_best)]);
disp(['变量取值:',num2str(f_best)]);
% 下面一段用来输出 粒子群最佳适应度的排行榜
[socre,ind] = sort(fp_best, 'descend') % 降序排序
DaAn = zeros(3,2);
for i=1:N
row = ind(i);
DaAn(i,:) = p_best(row,:);
end算法的改进
改进思路:
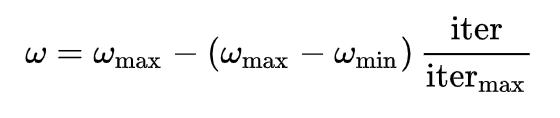
(1)修改惯性权重
- 惯性因子线性递减。(把Wmax逐渐变成Wmin)
- 惯性因子自适应。(当各微粒的目标值趋于一致或趋于局部最优时,将使惯性权重增大,而各微粒的目标值比较分散时,使惯性权重减小)(0.4-0.9)

- 惯性因子随机权重。(随机地选取值,使得微粒历史速度对当前速度的影响是随机的,随机权重策略的PSO算法对于多峰函数,能在一定程度上避免陷入局部最优。)

- 增加收缩因子(如下两种)
A:
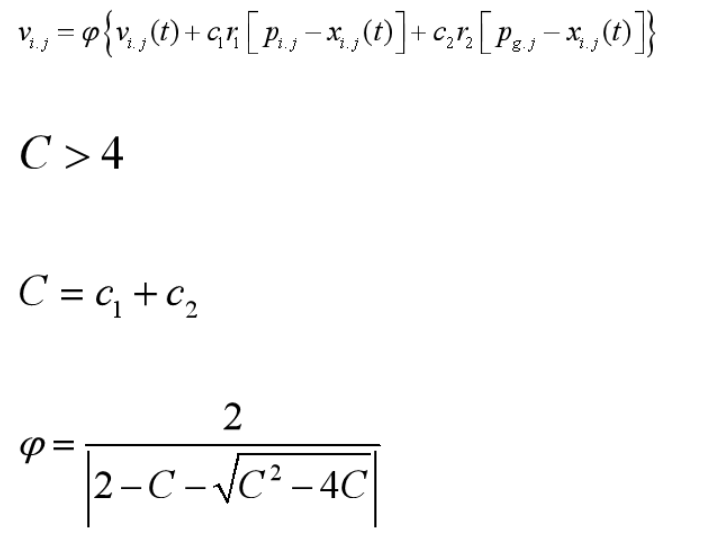
B:

后续看到文献会补充!!!
小白一个,参照多篇,自我总结,侵删(私聊我),勿喷!!!
智能推荐
6、JVM-JVM调优工具与实战-程序员宅基地
文章浏览阅读1.1k次,点赞28次,收藏26次。JVM调优
Node.js毕业设计家用电器电商网站(Express+源码+调试)_关于家电网站的选题背景和意义-程序员宅基地
文章浏览阅读729次,点赞26次,收藏17次。本毕业设计旨在利用前端技术HTML、CSS、JavaScript和Vue框架,结合后端技术Node.js和Express框架,以及MySQL 5.7数据库,通过VSCode和Navicat开发工具,实现一个功能完善、操作简便的家用电器电商网站。此外,通过本毕业设计的实践,可以锻炼学生的实际操作能力,提高学生的编程水平,为学生今后的职业生涯打下坚实的基础。HBuilder X是一个专为前端开发者设计的IDE,支持HTML、CSS、JavaScript等前端技术,以及Vue.js框架。_关于家电网站的选题背景和意义
ESXi+docker_esxi docker-程序员宅基地
文章浏览阅读1.3w次。文章目录ESXi安装1、ESXi安装:2、重启后的配置:Docker环境部署1、创建虚拟机2、安装完之后,连上xshell,安装docker3、配置容器镜像4、从容器里拉取资源Docker部署Tomcat发布测试1、从容器里拉取资源tomcat2、新建数据库插入数据3、新建maven工程,webapp4、写ssm读数据库5、打war包5、上传到容器里ESXi安装1、ESXi安装:基本上都是下一步,就不做过多介绍了自定义硬件为iso镜像的路径,然后就完成了,重启2、重启后的配置:_esxi docker
ArcGIS RunTime概述_arcgis runtime qt 删除点-程序员宅基地
文章浏览阅读1w次,点赞3次,收藏9次。ArcGIS Runtime 是新一代的轻量级的桌面开发产品,它提供多种API,可以使用WPF,Java等开发环境快速的构建地图应用,并将应用程序部署在Microsoft Windows和Linux等通用平台上。ArcGIS Runtime支持在线和离线的资源调用模式,具有开发简单,部署快速,体验良好等特点,成为云GIS环境下一个不错的选择,将在云GIS环境下扮演重要角色。 ArcGIS_arcgis runtime qt 删除点
FFmpeg指定x265编码器线程数-程序员宅基地
文章浏览阅读4.7k次。转载请注明出处:http://cyc.wiki/index.php/2018/07/17/ffmpeg指定x265编码器线程数/FFmpeg的-threads参数FFmpeg调用编码器时,一般使用-threads参数对编码器使用的线程数进行设置。 比如:ffmpeg -s 1920x1080 -framerate 25 -i input.yuv -c:v libx264 -t..._ffmpeg指定x265编码器线程数
ubuntu查看网速的工具_ubuntu查看网口百兆千兆-程序员宅基地
文章浏览阅读3.4k次。1.工具一:slurm安装sudo apt-get install slurm (Ubuntu系统)查看网速命令slurm -i eth0 (etho为网卡名)*******************************************************************************************************xiabi_ubuntu查看网口百兆千兆
随便推点
Linux下的WEB服务器的搭建实战_linux搭建web服务器-程序员宅基地
文章浏览阅读1.9w次,点赞43次,收藏332次。Linux下的web服务器搭建详细过程每次搭建一个服务器之前,比如MySQL、DNS、WEB等首先要挂载磁盘目录文件挂载就是当要使用某个设备时(例如光盘或软盘),必须先将它们对应放到 Linux 系统中的某个目录上。其中对应的目录就叫作挂载点。只有经过操作之后,用户或程序才能访问到这些设备。这个操作过程就叫作文件系统的挂载。这里/dev/sr0是软盘,/mnt/cdrom是挂载点[root@wry139 ~]# mount /dev/sr0 /mnt/cdrom/mount: /dev/sr0 写保_linux搭建web服务器
SSM框架配置文件详解_ssm配置文件-程序员宅基地
文章浏览阅读4.8k次,点赞5次,收藏70次。SSM框架配置文件详解在SSM项目当中,所需要的配置文件总共有以下三个:①web.xml ②applicationContext.xml ③springmvc.xml以及两个properties文件jdbc.properties和log4j.properties1.web.xmlweb.xml是ssm项目当中最重要的一个配置文件,当服务启动时会首先加载web.xml这个文件,里面包括了对前端控制器、字符编码的配置案例:<?xml version="1.0" encoding_ssm配置文件
HTC Vive手柄圆盘控制角色移动_unity怎么用htc的手柄控制人物移动-程序员宅基地
文章浏览阅读6.9k次,点赞3次,收藏27次。这篇文章主要写的是通过手柄控制移动在场景中漫游。 在通过手柄控制移动时,我主要写了两个脚本一个ChildTransform.cs、Move.cs; 1、 ChildTransform这个脚本主要是为了获取头部Y轴方向的转动。以及头部在x、z轴方向的移动。将这个信息赋值给这个脚本绑定的对象身上。 2、 Move这个脚本主要是为了控制玩家的移动的,移动的方向是依据绑定ChildTransf_unity怎么用htc的手柄控制人物移动
centos7安装mysqlclient踩坑记录_mysqlclient.lib gcc-程序员宅基地
文章浏览阅读1.2k次。centos7安装mysqlclient踩坑记录服务器环境为centos7 使用Django3.1部署一个小项目 安装mysqlclient的过程中报错[root@guest download]# pip3.9 install mysqlclientCollecting mysqlclient Using cached mysqlclient-2.0.2.tar.gz (88 kB)Using legacy 'setup.py install' for mysqlclient, since pa_mysqlclient.lib gcc
spring-boot-admin-starter-client与spring-boot版本不匹配的坑_找不到 de.codecentric:spring-boot-admin-starter-serve-程序员宅基地
文章浏览阅读8.8k次。***************************APPLICATION FAILED TO START***************************Description:An attempt was made to call the method org.springframework.boot.web.client.RestTemplateBuilder.setConnectTimeout(Ljava/time/Duration;)Lorg/springframe..._找不到 de.codecentric:spring-boot-admin-starter-server:sources:2.5.2
遍历 ArrayList 时安全删除元素_java arraylist安全删除-程序员宅基地
文章浏览阅读258次。遍历 ArrayList 时安全删除元素_java arraylist安全删除