STM32学习笔记(6_2)- TIM定时器中断和定时器内外时钟源选择代码_stm32设置一个定时器的时钟来自另一个定时器-程序员宅基地
技术标签: stm32 学习 STM32 笔记 嵌入式硬件 单片机
无人问津也好,技不如人也罢,都应静下心来,去做该做的事。
最近在学STM32,所以也开贴记录一下主要内容,省的过目即忘。视频教程为江科大(改名江协科技),网站jiangxiekeji.com
现在开始上难度,STM32功能最强大、结构最复杂的外设——定时器,分四期介绍。
上一期介绍最基础的定时功能理论,这期主要是定时器中断和定时器内外时钟源选择的代码。
下一期介绍定时器输出比较的功能,常用产生PWM波驱动电机。
再下一期介绍定时器输入捕获功能,常用测量方波频率。
最后介绍定时器的编码器接口,更方便读取正交编码器的输出波形,常用编码电机测速。
定时器常用函数
先介绍一些常用的TIM定时器函数,
//TIM_DeInit():恢复缺省配置
void TIM_DeInit(TIM_TypeDef* TIMx);
//TIM_TimeBaseInit(选择某个定时器,结构体_配置时基单元的参数):配置时基单元
void TIM_TimeBaseInit(TIM_TypeDef* TIMx, TIM_TimeBaseInitTypeDef* TIM_TimeBaseInitStruct);
//TIM_TimeBaseStructInit()
void TIM_TimeBaseStructInit(TIM_TimeBaseInitTypeDef* TIM_TimeBaseInitStruct);
//TIM_Cmd(选择定时器,使能还是失能):使能计数器——对应图中运行控制
void TIM_Cmd(TIM_TypeDef* TIMx, FunctionalState NewState);
//TIM_ITConfig():使能中断输出信号
void TIM_ITConfig(TIM_TypeDef* TIMx, uint16_t TIM_IT, FunctionalState NewState);
//TIM_ITRxExternalClockConfig(选择要配置的定时器,选择要接入哪个其他的定时器):选择ITRx其他定时器的时钟
void TIM_ITRxExternalClockConfig(TIM_TypeDef* TIMx, uint16_t TIM_InputTriggerSource);
//TIM_TIxExternalClockConfig(选择要配置的定时器,选择TIx具体的某个引脚,输入的极性,滤波器):选择TIx捕获通道的时钟
void TIM_TIxExternalClockConfig(TIM_TypeDef* TIMx, uint16_t TIM_TIxExternalCLKSource,
uint16_t TIM_ICPolarity, uint16_t ICFilter);
//TIM_ETRClockMode1Config(选择要配置的定时器,外部触发预分频器,输入的极性,滤波器):选择ETR通过外部时钟模式1输入的时钟
void TIM_ETRClockMode1Config(TIM_TypeDef* TIMx, uint16_t TIM_ExtTRGPrescaler, uint16_t TIM_ExtTRGPolarity,
uint16_t ExtTRGFilter);
//TIM_ETRClockMode2Config(选择要配置的定时器,外部触发预分频器,输入的极性,滤波器):选择ETR通过外部时钟模式2输入的时钟
void TIM_ETRClockMode2Config(TIM_TypeDef* TIMx, uint16_t TIM_ExtTRGPrescaler,
uint16_t TIM_ExtTRGPolarity, uint16_t ExtTRGFilter);
//TIM_ETRConfig():就是单独用来配置ETR引脚的预分频器、极性、滤波器这些参数的
void TIM_ETRConfig(TIM_TypeDef* TIMx, uint16_t TIM_ExtTRGPrescaler, uint16_t TIM_ExtTRGPolarity,
uint16_t ExtTRGFilter);
//TIM_PrescalerConfig(要写入的预分频值,写入的模式):就是用来单独写预分频值的
void TIM_PrescalerConfig(TIM_TypeDef* TIMx, uint16_t Prescaler, uint16_t TIM_PSCReloadMode);
//TIM_CounterModeConfig():用来改变计数器的计数模式
void TIM_CounterModeConfig(TIM_TypeDef* TIMx, uint16_t TIM_CounterMode);
//TIM_ARRPreloadConfig():自动重装器预装功能配置
void TIM_ARRPreloadConfig(TIM_TypeDef* TIMx, FunctionalState NewState);
//TIM_SetCounter():给计数器写入一个值,如果你想手动给一个计数值,就可以用这个函数
void TIM_SetCounter(TIM_TypeDef* TIMx, uint16_t Counter);
//TIM_SetAutoreload():给自动重装器写入一个值,如果你想手动给一个自动重装值,就可以用这个函数
void TIM_SetAutoreload(TIM_TypeDef* TIMx, uint16_t Autoreload);
//TIM_GetCounter():获取当前计数器的值,如果你想看当前计数器计到哪里了,就河以调用一下这个函数,返回值就是当前的计数器的值
uint16_t TIM_GetCounter(TIM_TypeDef* TIMx);
//TIM_GetPrescaler():获取当前的预分频器的值,如果想看预分频值,就调一下这个函数
uint16_t TIM_GetPrescaler(TIM_TypeDef* TIMx);
//TIM_SetCounter():给计数器写入一个值,如果你想手动给一个计数值,就可以用这个函数
void TIM_SetCounter(TIM_TypeDef* TIMx, uint16_t Counter);
//TIM_SetAutoreload():给自动重装器写入一个值,如果你想手动给一个自动重装值,就可以用这个函数
void TIM_SetAutoreload(TIM_TypeDef* TIMx, uint16_t Autoreload);
//TIM_GetCounter():获取当前计数器的值,如果你想看当前计数器计到哪里了,就河以调用一下这个函数,返回值就是当前的计数器的值
uint16_t TIM_GetCounter(TIM_TypeDef* TIMx);
//TIM_GetPrescaler():获取当前的预分频器的值,如果想看预分频值,就调一下这个函数
uint16_t TIM_GetPrescaler(TIM_TypeDef* TIMx);
FlagStatus TIM_GetFlagStatus(TIM_TypeDef* TIMx, uint16_t TIM_FLAG);
void TIM_ClearFlag(TIM_TypeDef* TIMx, uint16_t TIM_FLAG);
ITStatus TIM_GetITStatus(TIM_TypeDef* TIMx, uint16_t TIM_IT);
void TIM_ClearITPendingBit(TIM_TypeDef* TIMx, uint16_t TIM_IT);
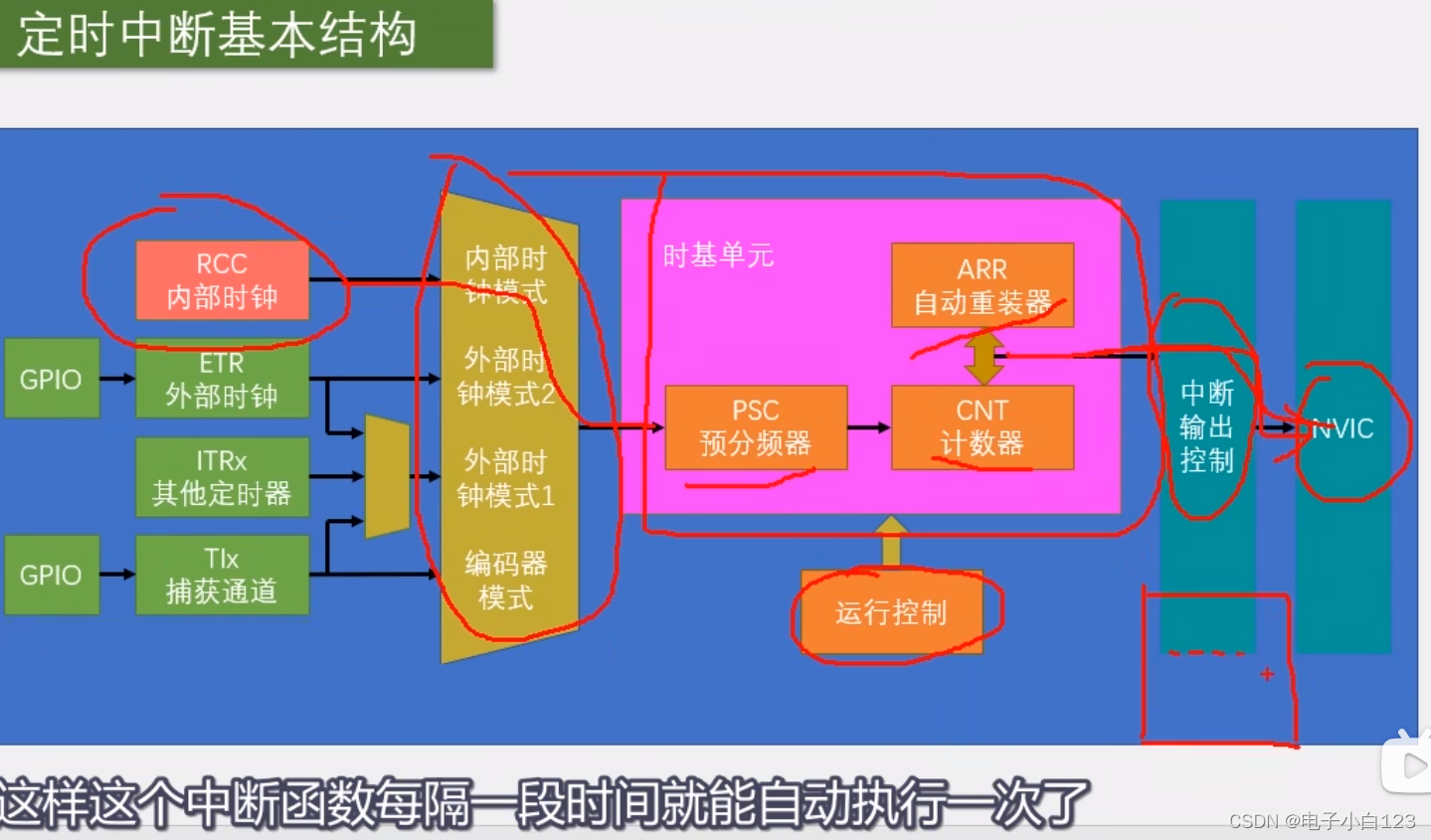
定时器定时中断基本结构
本期主要两个实验
定时器定时中断
可以看到OLED上显示了一个数字Num,并且每秒自动加1。这个就是用了定时中断的功能,定时器使用内部时钟定了1秒的时间,每隔1秒申请一下中断,然后在中断函数里执行Num++ ,最后在OLED上显示Num++。
接线图

初始化定时器操作步骤
这里要初始化的是TIM2,通用定时器
1、RCC开启时钟,这里注意,要使用APB1的开启时钟函数,因为TIM2是APB1总线的外设
2、选择时基单元的时钟源,定时中断直接选择内部时钟源就好
/*开启时钟*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //开启TIM2的时钟
/*配置时钟源*/
TIM_InternalClockConfig(TIM2); //选择TIM2为内部时钟,若不调用此函数,TIM默认也为内部时钟3、配置时基单元,包括这里的预分频器、自动重装器、计数模式等等,这些参数用一个结构体就可以配置。定时器的时钟基准都是72MHz,ARR和PSC的值不唯一,可以互换,就注意不要超过65535(2的16次方)

/*时基单元初始化*/
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //定义结构体变量
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频,选择不分频,此参数用于配置滤波器时钟,不影响时基单元功能
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数器模式,选择向上计数
TIM_TimeBaseInitStructure.TIM_Period = 10000 - 1; //计数周期,即ARR的值
TIM_TimeBaseInitStructure.TIM_Prescaler = 7200 - 1; //预分频器,即PSC的值
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器,高级定时器才会用到
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure); //将结构体变量交给TIM_TimeBaseInit,配置TIM2的时基单元
4、配置输出中断控制,允许更新中断输出到NVIC
/*中断输出配置*/
TIM_ClearFlag(TIM2, TIM_FLAG_Update); //清除定时器更新标志位
//TIM_TimeBaseInit函数末尾,手动产生了更新事件
//若不清除此标志位,则开启中断后,会立刻进入一次中断
//如果不介意此问题,则不清除此标志位也可
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE); //开启TIM2的更新中断
5、配置NVIC,在NVIC中打开定时器中断的通道,并分配一个优先级
/*NVIC中断分组*/
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //配置NVIC为分组2
//即抢占优先级范围:0~3,响应优先级范围:0~3
//此分组配置在整个工程中仅需调用一次
//若有多个中断,可以把此代码放在main函数内,while循环之前
//若调用多次配置分组的代码,则后执行的配置会覆盖先执行的配置
/*NVIC配置*/
NVIC_InitTypeDef NVIC_InitStructure; //定义结构体变量
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn; //选择配置NVIC的TIM2线
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //指定NVIC线路使能
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //指定NVIC线路的抢占优先级为2
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //指定NVIC线路的响应优先级为1
NVIC_Init(&NVIC_InitStructure); //将结构体变量交给NVIC_Init,配置NVIC外设
6、使能定时器。
整个模块配置完成后,我们还需要使能一下计数器,当定时器使能后,计数器就会开始计数了,当计数器更新时,触发中断。
/*TIM使能*/
TIM_Cmd(TIM2, ENABLE); //使能TIM2,定时器开始运行7、最后我们再写一个定时器的中断函数,这样这个中断函数每隔一段时间就能自动执行一次了。
这个中断函数一般放在main函数后面使用
/* 定时器中断函数,可以复制到使用它的地方,可放在main函数后面
void TIM2_IRQHandler(void)
{
if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET)
{
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
}
}
*/
完整代码展示
因为TIM定时器在STM32内部,不涉及硬件,所以先在System(也可放在其他文件夹里)下新建一个文件(Timer)的.c、.h文件,把TIM定时器的驱动函数封装起来。
main函数
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Timer.h"
uint16_t Num; //定义在定时器中断里自增的变量
int main(void)
{
/*模块初始化*/
OLED_Init(); //OLED初始化
Timer_Init(); //定时中断初始化
/*显示静态字符串*/
OLED_ShowString(1, 1, "Num:"); //1行1列显示字符串Num:
while (1)
{
OLED_ShowNum(1, 5, Num, 5); //不断刷新显示Num变量
}
}
/**
* 函 数:TIM2中断函数
* 参 数:无
* 返 回 值:无
* 注意事项:此函数为中断函数,无需调用,中断触发后自动执行
* 函数名为预留的指定名称,可以从启动文件复制
* 请确保函数名正确,不能有任何差异,否则中断函数将不能进入
*/
void TIM2_IRQHandler(void)
{
if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET) //判断是否是TIM2的更新事件触发的中断
{
Num ++; //Num变量自增,用于测试定时中断
TIM_ClearITPendingBit(TIM2, TIM_IT_Update); //清除TIM2更新事件的中断标志位
//中断标志位必须清除
//否则中断将连续不断地触发,导致主程序卡死
}
}
Timer.h文件
#ifndef __TIMER_H
#define __TIMER_H
void Timer_Init(void);
#endif
Timer.c文件
#include "stm32f10x.h" // Device header
/**
* 函 数:定时中断初始化
* 参 数:无
* 返 回 值:无
*/
void Timer_Init(void)
{
/*开启时钟*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //开启TIM2的时钟
/*配置时钟源*/
TIM_InternalClockConfig(TIM2); //选择TIM2为内部时钟,若不调用此函数,TIM默认也为内部时钟
/*时基单元初始化*/
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //定义结构体变量
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频,选择不分频,此参数用于配置滤波器时钟,不影响时基单元功能
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数器模式,选择向上计数
TIM_TimeBaseInitStructure.TIM_Period = 10000 - 1; //计数周期,即ARR的值
TIM_TimeBaseInitStructure.TIM_Prescaler = 7200 - 1; //预分频器,即PSC的值
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器,高级定时器才会用到
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure); //将结构体变量交给TIM_TimeBaseInit,配置TIM2的时基单元
/*中断输出配置*/
TIM_ClearFlag(TIM2, TIM_FLAG_Update); //清除定时器更新标志位
//TIM_TimeBaseInit函数末尾,手动产生了更新事件
//若不清除此标志位,则开启中断后,会立刻进入一次中断
//如果不介意此问题,则不清除此标志位也可
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE); //开启TIM2的更新中断
/*NVIC中断分组*/
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //配置NVIC为分组2
//即抢占优先级范围:0~3,响应优先级范围:0~3
//此分组配置在整个工程中仅需调用一次
//若有多个中断,可以把此代码放在main函数内,while循环之前
//若调用多次配置分组的代码,则后执行的配置会覆盖先执行的配置
/*NVIC配置*/
NVIC_InitTypeDef NVIC_InitStructure; //定义结构体变量
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn; //选择配置NVIC的TIM2线
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //指定NVIC线路使能
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //指定NVIC线路的抢占优先级为2
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //指定NVIC线路的响应优先级为1
NVIC_Init(&NVIC_InitStructure); //将结构体变量交给NVIC_Init,配置NVIC外设
/*TIM使能*/
TIM_Cmd(TIM2, ENABLE); //使能TIM2,定时器开始运行
}
/* 定时器中断函数,可以复制到使用它的地方
void TIM2_IRQHandler(void)
{
if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET)
{
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
}
}
*/
定时器外部时钟
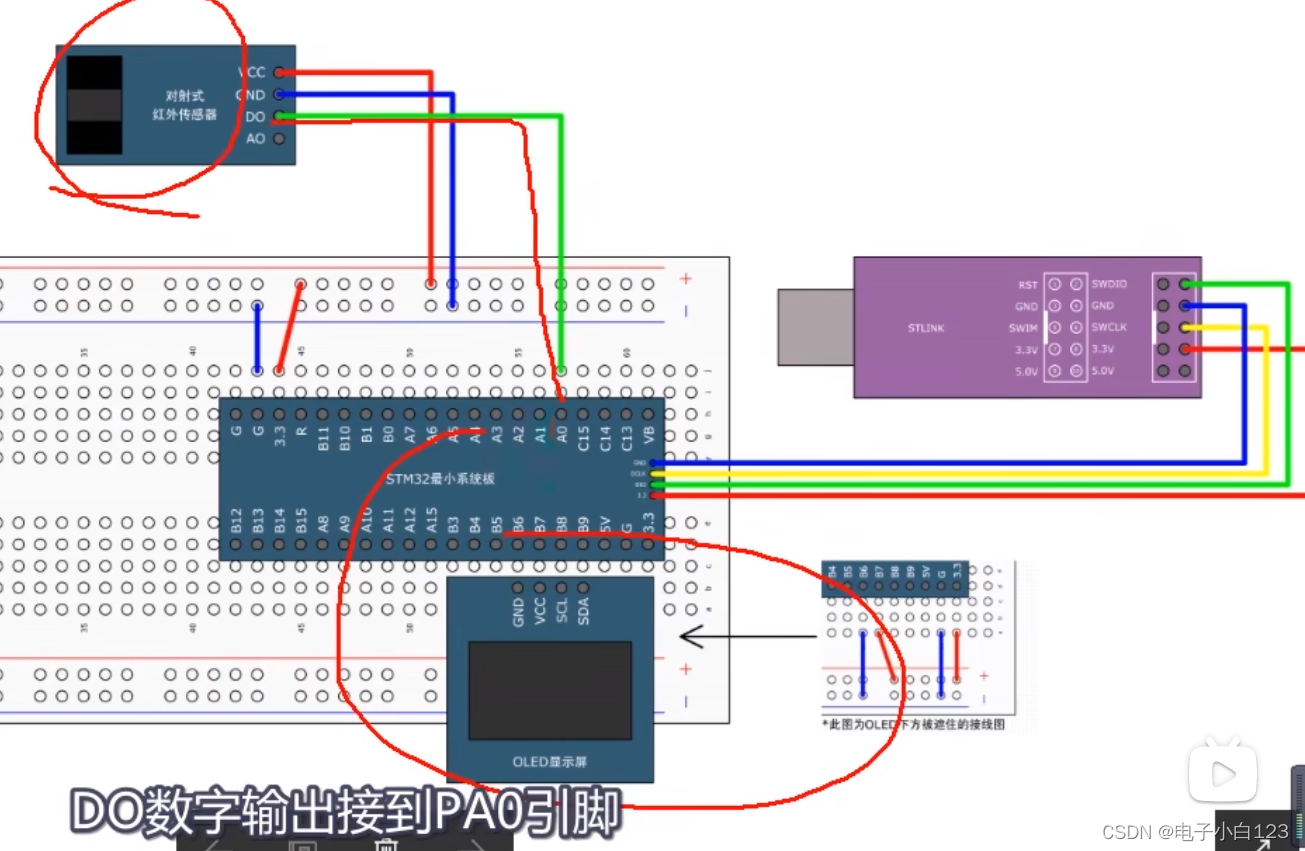
使用外部时钟来驱动定时器,我们可以在定时器指定的外部引脚上,输入一个方波信号,来提供定时器计算的时钟,现在这里暂时用这个对射式红外传感器来手动模拟一个外部时钟,用挡光片,依次遮挡、移开、遮挡、移开,提供一个方波。可以看到这个OLED上下面这个CNT就是定时器中计数器的值,每遮挡、移开一次,计数器加1,然后计数器记到9后,自动清0。同时申请中断,执行Num++。
接线图
初始化定时器操作步骤
这里要初始化的是TIM2(通用定时器)和GPIOA
1、RCC开启TIM2和GPIOA时钟,这里注意,要使用APB1的开启时钟函数,因为TIM2是APB1总线的外设
2、GPIO初始化
/*开启时钟*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //开启TIM2的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA0引脚初始化为上拉输入3、选择时基单元的时钟源,用外部时钟输入模式2
/*外部时钟配置*/
TIM_ETRClockMode2Config(TIM2, TIM_ExtTRGPSC_OFF, TIM_ExtTRGPolarity_NonInverted, 0x0F);
//选择外部时钟模式2,时钟从TIM_ETR引脚输入
//注意TIM2的ETR引脚固定为PA0,无法随意更改
//最后一个滤波器参数加到最大0x0F,可滤除时钟信号抖动
后面的步骤和定时中断没多大区别,就直接上完整代码吧
完整代码展示
main函数
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Timer.h"
uint16_t Num; //定义在定时器中断里自增的变量
int main(void)
{
/*模块初始化*/
OLED_Init(); //OLED初始化
Timer_Init(); //定时中断初始化
/*显示静态字符串*/
OLED_ShowString(1, 1, "Num:"); //1行1列显示字符串Num:
OLED_ShowString(2, 1, "CNT:"); //2行1列显示字符串CNT:
while (1)
{
OLED_ShowNum(1, 5, Num, 5); //不断刷新显示Num变量
OLED_ShowNum(2, 5, Timer_GetCounter(), 5); //不断刷新显示CNT的值
}
}
/**
* 函 数:TIM2中断函数
* 参 数:无
* 返 回 值:无
* 注意事项:此函数为中断函数,无需调用,中断触发后自动执行
* 函数名为预留的指定名称,可以从启动文件复制
* 请确保函数名正确,不能有任何差异,否则中断函数将不能进入
*/
void TIM2_IRQHandler(void)
{
if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET) //判断是否是TIM2的更新事件触发的中断
{
Num ++; //Num变量自增,用于测试定时中断
TIM_ClearITPendingBit(TIM2, TIM_IT_Update); //清除TIM2更新事件的中断标志位
//中断标志位必须清除
//否则中断将连续不断地触发,导致主程序卡死
}
}
Timer.h文件
#ifndef __TIMER_H
#define __TIMER_H
void Timer_Init(void);
uint16_t Timer_GetCounter(void);
#endif
Timer.c文件
#include "stm32f10x.h" // Device header
/**
* 函 数:定时中断初始化
* 参 数:无
* 返 回 值:无
* 注意事项:此函数配置为外部时钟,定时器相当于计数器
*/
void Timer_Init(void)
{
/*开启时钟*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //开启TIM2的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA0引脚初始化为上拉输入
/*外部时钟配置*/
TIM_ETRClockMode2Config(TIM2, TIM_ExtTRGPSC_OFF, TIM_ExtTRGPolarity_NonInverted, 0x0F);
//选择外部时钟模式2,时钟从TIM_ETR引脚输入
//注意TIM2的ETR引脚固定为PA0,无法随意更改
//最后一个滤波器参数加到最大0x0F,可滤除时钟信号抖动
/*时基单元初始化*/
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //定义结构体变量
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频,选择不分频,此参数用于配置滤波器时钟,不影响时基单元功能
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数器模式,选择向上计数
TIM_TimeBaseInitStructure.TIM_Period = 10 - 1; //计数周期,即ARR的值
TIM_TimeBaseInitStructure.TIM_Prescaler = 1 - 1; //预分频器,即PSC的值
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器,高级定时器才会用到
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure); //将结构体变量交给TIM_TimeBaseInit,配置TIM2的时基单元
/*中断输出配置*/
TIM_ClearFlag(TIM2, TIM_FLAG_Update); //清除定时器更新标志位
//TIM_TimeBaseInit函数末尾,手动产生了更新事件
//若不清除此标志位,则开启中断后,会立刻进入一次中断
//如果不介意此问题,则不清除此标志位也可
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE); //开启TIM2的更新中断
/*NVIC中断分组*/
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //配置NVIC为分组2
//即抢占优先级范围:0~3,响应优先级范围:0~3
//此分组配置在整个工程中仅需调用一次
//若有多个中断,可以把此代码放在main函数内,while循环之前
//若调用多次配置分组的代码,则后执行的配置会覆盖先执行的配置
/*NVIC配置*/
NVIC_InitTypeDef NVIC_InitStructure; //定义结构体变量
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn; //选择配置NVIC的TIM2线
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //指定NVIC线路使能
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //指定NVIC线路的抢占优先级为2
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //指定NVIC线路的响应优先级为1
NVIC_Init(&NVIC_InitStructure); //将结构体变量交给NVIC_Init,配置NVIC外设
/*TIM使能*/
TIM_Cmd(TIM2, ENABLE); //使能TIM2,定时器开始运行
}
/**
* 函 数:返回定时器CNT的值
* 参 数:无
* 返 回 值:定时器CNT的值,范围:0~65535
*/
uint16_t Timer_GetCounter(void)
{
return TIM_GetCounter(TIM2); //返回定时器TIM2的CNT
}
/* 定时器中断函数,可以复制到使用它的地方
void TIM2_IRQHandler(void)
{
if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET)
{
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
}
}
*/
智能推荐
FTP命令字和返回码_ftp 登录返回230-程序员宅基地
文章浏览阅读3.5k次,点赞2次,收藏13次。为了从FTP服务器下载文件,需要要实现一个简单的FTP客户端。FTP(文件传输协议) 是 TCP/IP 协议组中的应用层协议。FTP协议使用字符串格式命令字,每条命令都是一行字符串,以“\r\n”结尾。客户端发送格式是:命令+空格+参数+"\r\n"的格式服务器返回格式是以:状态码+空格+提示字符串+"\r\n"的格式,代码只要解析状态码就可以了。读写文件需要登陆服务器,特殊用..._ftp 登录返回230
centos7安装rabbitmq3.6.5_centos7 安装rabbitmq3.6.5-程序员宅基地
文章浏览阅读648次。前提:systemctl stop firewalld 关闭防火墙关闭selinux查看getenforce临时关闭setenforce 0永久关闭sed-i'/SELINUX/s/enforcing/disabled/'/etc/selinux/configselinux的三种模式enforcing:强制模式,SELinux 运作中,且已经正确的开始限制..._centos7 安装rabbitmq3.6.5
idea导入android工程,idea怎样导入Android studio 项目?-程序员宅基地
文章浏览阅读5.8k次。满意答案s55f2avsx2017.09.05采纳率:46%等级:12已帮助:5646人新版Android Studio/IntelliJ IDEA可以直接导入eclipse项目,不再推荐使用eclipse导出gradle的方式2启动Android Studio/IntelliJ IDEA,选择 import project3选择eclipse 项目4选择 create project f..._android studio 项目导入idea 看不懂安卓项目
浅谈AI大模型技术:概念、发展和应用_ai大模型应用开发-程序员宅基地
文章浏览阅读860次,点赞2次,收藏6次。AI大模型技术已经在自然语言处理、计算机视觉、多模态交互等领域取得了显著的进展和成果,同时也引发了一系列新的挑战和问题,如数据质量、计算效率、知识可解释性、安全可靠性等。城市运维涉及到多个方面,如交通管理、环境监测、公共安全、社会治理等,它们需要处理和分析大量的多模态数据,如图像、视频、语音、文本等,并根据不同的场景和需求,提供合适的决策和响应。知识搜索有多种形式,如语义搜索、对话搜索、图像搜索、视频搜索等,它们可以根据用户的输入和意图,从海量的数据源中检索出最相关的信息,并以友好的方式呈现给用户。_ai大模型应用开发
非常详细的阻抗测试基础知识_阻抗实部和虚部-程序员宅基地
文章浏览阅读8.2k次,点赞12次,收藏121次。为什么要测量阻抗呢?阻抗能代表什么?阻抗测量的注意事项... ...很多人可能会带着一系列的问题来阅读本文。不管是数字电路工程师还是射频工程师,都在关注各类器件的阻抗,本文非常值得一读。全文13000多字,认真读完大概需要2小时。一、阻抗测试基本概念阻抗定义:阻抗是元器件或电路对周期的交流信号的总的反作用。AC 交流测试信号 (幅度和频率)。包括实部和虚部。图1 阻抗的定义阻抗是评测电路、元件以及制作元件材料的重要参数。那么什么是阻抗呢?让我们先来看一下阻抗的定义。首先阻抗是一个矢量。通常,阻抗是_阻抗实部和虚部
小学生python游戏编程arcade----基本知识1_arcade语言 like-程序员宅基地
文章浏览阅读955次。前面章节分享试用了pyzero,pygame但随着想增加更丰富的游戏内容,好多还要进行自己编写类,从今天开始解绍一个新的python游戏库arcade模块。通过此次的《连连看》游戏实现,让我对swing的相关知识有了进一步的了解,对java这门语言也有了比以前更深刻的认识。java的一些基本语法,比如数据类型、运算符、程序流程控制和数组等,理解更加透彻。java最核心的核心就是面向对象思想,对于这一个概念,终于悟到了一些。_arcade语言 like
随便推点
【增强版短视频去水印源码】去水印微信小程序+去水印软件源码_去水印机要增强版-程序员宅基地
文章浏览阅读1.1k次。源码简介与安装说明:2021增强版短视频去水印源码 去水印微信小程序源码网站 去水印软件源码安装环境(需要材料):备案域名–服务器安装宝塔-安装 Nginx 或者 Apachephp5.6 以上-安装 sg11 插件小程序已自带解析接口,支持全网主流短视频平台,搭建好了就能用注:接口是公益的,那么多人用解析慢是肯定的,前段和后端源码已经打包,上传服务器之后在配置文件修改数据库密码。然后输入自己的域名,进入后台,创建小程序,输入自己的小程序配置即可安装说明:上传源码,修改data/_去水印机要增强版
verilog进阶语法-触发器原语_fdre #(.init(1'b0) // initial value of register (1-程序员宅基地
文章浏览阅读557次。1. 触发器是FPGA存储数据的基本单元2. 触发器作为时序逻辑的基本元件,官方提供了丰富的配置方式,以适应各种可能的应用场景。_fdre #(.init(1'b0) // initial value of register (1'b0 or 1'b1) ) fdce_osc (
嵌入式面试/笔试C相关总结_嵌入式面试笔试c语言知识点-程序员宅基地
文章浏览阅读560次。本该是不同编译器结果不同,但是尝试了g++ msvc都是先计算c,再计算b,最后得到a+b+c是经过赋值以后的b和c参与计算而不是6。由上表可知,将q复制到p数组可以表示为:*p++=*q++,*优先级高,先取到对应q数组的值,然后两个++都是在后面,该行运算完后执行++。在电脑端编译完后会分为text data bss三种,其中text为可执行程序,data为初始化过的ro+rw变量,bss为未初始化或初始化为0变量。_嵌入式面试笔试c语言知识点
57 Things I've Learned Founding 3 Tech Companies_mature-程序员宅基地
文章浏览阅读2.3k次。57 Things I've Learned Founding 3 Tech CompaniesJason Goldberg, Betashop | Oct. 29, 2010, 1:29 PMI’ve been founding andhelping run techn_mature
一个脚本搞定文件合并去重,大数据处理,可以合并几个G以上的文件_python 超大文本合并-程序员宅基地
文章浏览阅读1.9k次。问题:先讲下需求,有若干个文本文件(txt或者csv文件等),每行代表一条数据,现在希望能合并成 1 个文本文件,且需要去除重复行。分析:一向奉行简单原则,如无必要,绝不复杂。如果数据量不大,那么如下两条命令就可以搞定合并:cat a.txt >> new.txtcat b.txt >> new.txt……去重:cat new...._python 超大文本合并
支付宝小程序iOS端过渡页DFLoadingPageRootController分析_类似支付宝页面过度加载页-程序员宅基地
文章浏览阅读489次。这个过渡页是第一次打开小程序展示的,点击某个小程序前把手机的开发者->network link conditioner->enable & very bad network 就会在停在此页。比如《支付宝运动》这个小程序先看这个类的.h可以看到它继承于DTViewController点击左上角返回的方法- (void)back;#import "DTViewController.h"#import "APBaseLoadingV..._类似支付宝页面过度加载页