AIoT应用创新大赛-基于TencentOS Tiny 的遥控小车_智能小车连接腾讯云平台-程序员宅基地
技术标签: TencentOS Tiny
AIoT应用创新大赛-基于TencentOS Tiny 的遥控小车 - 云+社区 - 腾讯云![]() https://cloud.tencent.com/developer/article/1951791
https://cloud.tencent.com/developer/article/1951791
一,项目介绍。
很早就有做个智能小车的想法,但由于时间有限和囊中羞涩,一直没有付出行动,感谢腾讯TencentOS Tiny团队的信任,给了这么一次机会,虽然离自己的设想的功能还差很多,但至少迈出了重要的一步,更重要的是能学习TencentOS Tiny实时操作系统 和i.MX RT系列应用处理器,在此表示感谢。
最初的设想是能做个可以实时传输视频的巡检车,但是由于项目时间和目前硬件限制,目前只能说是做了个基于TencentOS Tiny 的遥控小车。主要实现了以下功能:
- 基于腾讯云平台,利用腾讯连连H5面板来控制小车动作。
- 小车的行驶,包括前进、后退、左转向、右转向。
- 小车避障,利用超声波模块测距,前进过程中,当距离小于30厘米,小车自动刹车,停止前进。
- 实时上报前方障碍物的距离,在H5面板中显示。
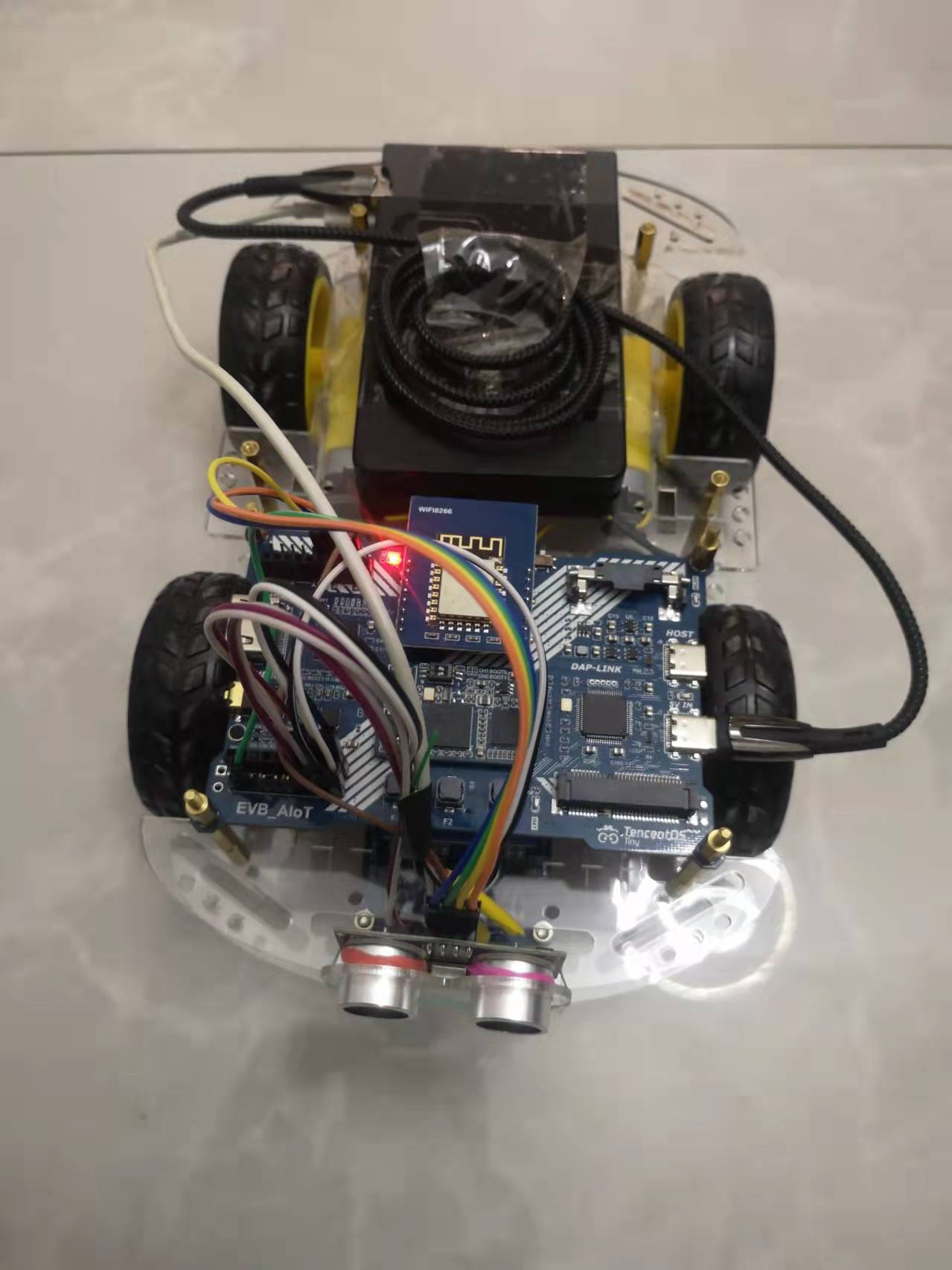
遥控小车
二,项目整体架构图
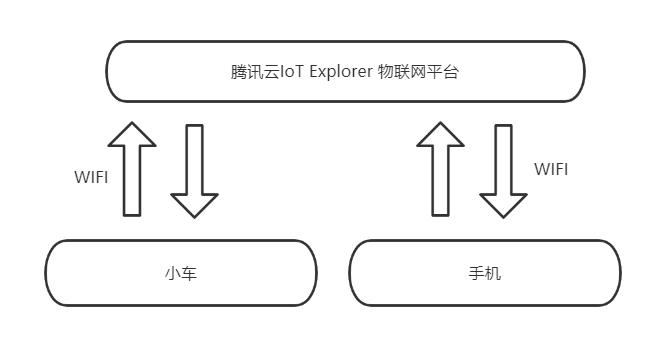
整体架构图
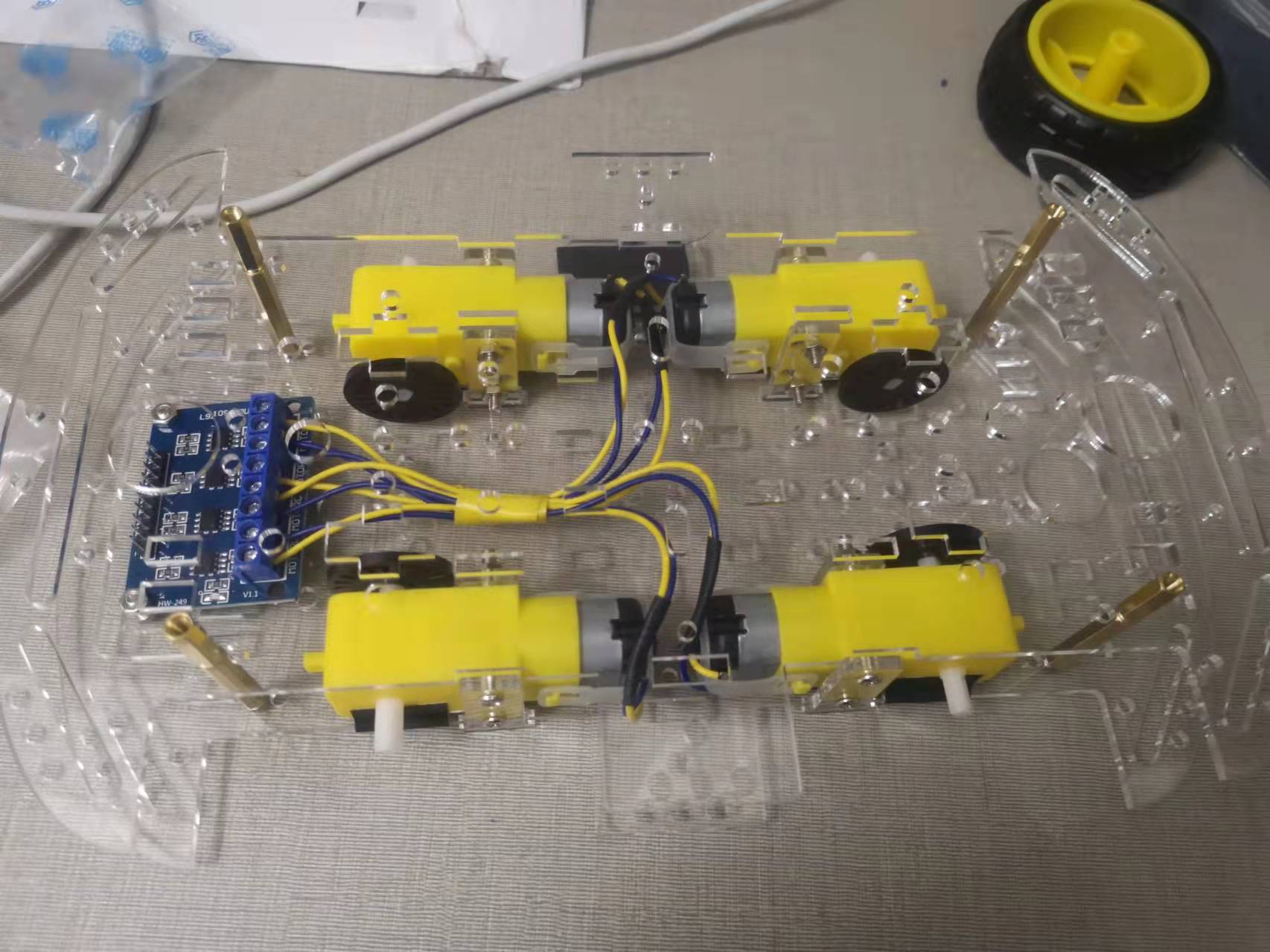
三,小车硬件组成。
1,小车底盘。四个直流电机驱动。
小车底盘
2,TencentOS Tiny AIoT开发套件
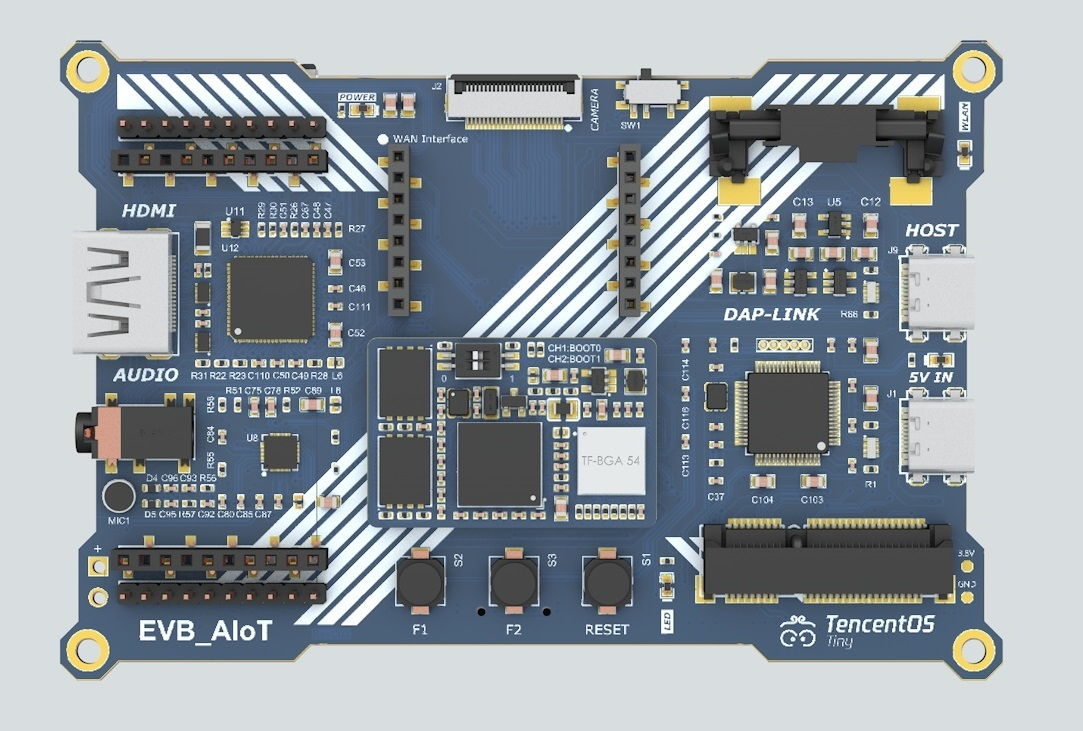
TencentOS Tiny AIoT开发板
开发板特性:
- 内置TencentOS Tiny开源物联网操作系统。
- 核心板采用的RT1062处理器属于i.MX RT 系列 MCU,是由 NXP 推出的跨界处理器,跨界是指该系列MCU的定位既非传统的微控制器、也非传统的微处理器,i.MX RT 系列 MCU 则综合了两者的优势,既具备高频率(最高主频600M)、高处理性能,也具备中断响应迅速、实时性高的特点。
- 1M RAM 16M SDRAM 64MB qspi flash 128MB spi flash。
- 板载Type-C接口CMSIS DAP仿真器。
- 板载PCIE接口,可扩展4G类物联网模组。
- 板载物联网俱乐部WAN Interface接口,可支持NB-IoT、WiFi、4G cat1、LoRa等模组。
- 板载物联网俱乐部E53 Interface接口,可扩展全系E53传感器。
- 板载标准24P DVP摄像头接口,可支持最高500万像素摄像头。
- 板载RGB显示接口,可转换HDMI输出。
- 板载高性能音频解码芯片,可做语音识别测试。
- 预留SD卡、用户按键、SPI Flash。
3,HG7881CP 四路直流电机驱动模块。
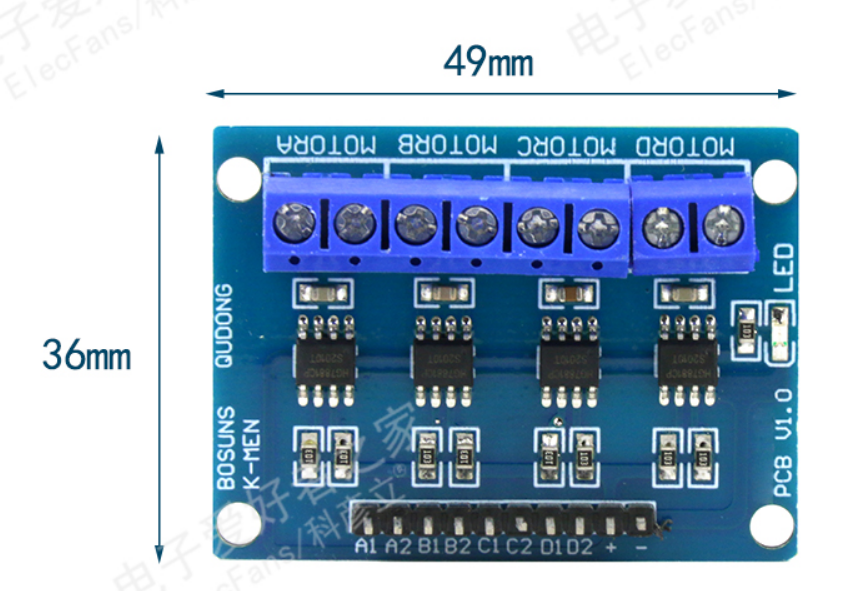
电机驱动模块

4,HC-SR04超声波测距模块。
HC-SR04

HC-SR04模块工作原理:
(1)采用IO触发测距,给至少10us的高电平信号;
(2)模块自动发送8个40khz的方波,自动检测是否有信号返回;
(3)有信号返回,通过IO输出一高电平,高电平持续的时间就是超声波从发射到返回的时间.
测试距离=(高电平时间*声速(340M/S))/2;
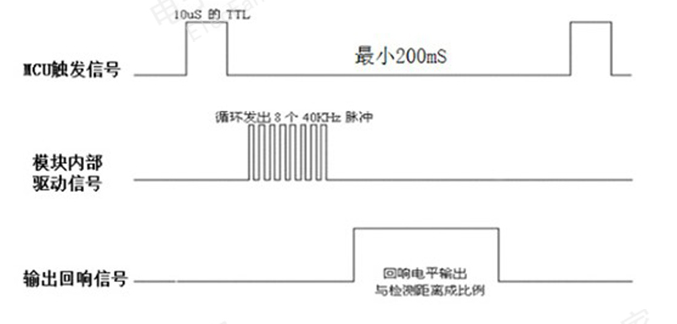
超声波时序图
5,ESP8266模组
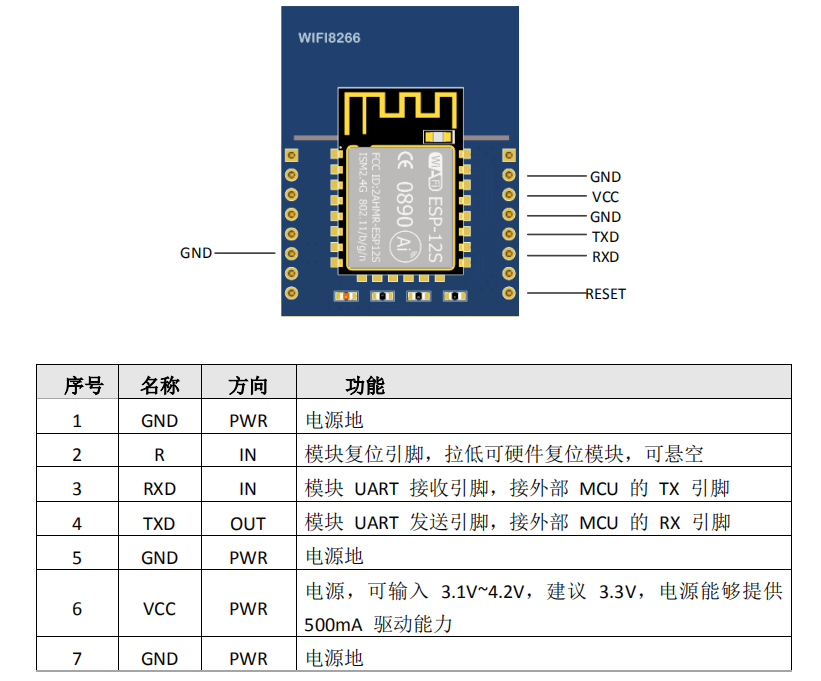
ESP8266模组
四,项目涉及到的知识点。
1,腾讯云平台的利用,H5面板配置及调试。
2,TencentOS Tiny的使用。
3,了解MQTT协议,了解cJSON数据格式。
4,利用ESP8266模块给腾讯云平台发送接收数据。
5,官方开发工具MCUXpresso IDE的使用。
6,RT1062的GPIO的配置。
7,RT1062利用输入捕获测量脉宽。
五,软件介绍。
1,TencentOS tiny物联网操作系统
TencentOS tiny是腾讯面向物联网领域开发的实时操作系统,现已捐赠给开放原子开源基金会进行孵化,具有低功耗,低资源占用,模块化,安全可靠等特点,可有效提升物联网终端产品开发效率。TencentOS tiny 提供精简的 RTOS 内核,内核组件可裁剪可配置,可快速移植到多种主流 MCU (如NXP Arm Cortex-M 全系列)及模组芯片上。而且,基于RTOS内核提供了丰富的物联网组件,内部集成主流物联网协议栈(如 CoAP/MQTT/TLS/DTLS/LoRaWAN/NB-IoT 等),可助力物联网终端设备及业务快速接入腾讯云物联网平台。
· 资源占用极少
TencentOS Tiny 内核具有超低资源占用的特点,RAM 0.8KB,ROM 1.8KB;在类似烟感和红外等实际场景下,TencentOS tiny 的资源占用仅为:RAM 2.69KB、ROM 12.38KB。
· 高效功耗管理框架
完整包含 MCU 和外围设备功耗管理,用户可以根据业务场景选择可参考的低功耗方案,有效降低设备耗电,延长设备寿命。
· 自动移植工具
TencentOS tiny 提供多种编译器快速移植指南和移植工具,可实现向新硬件开发板的一键移植,省时省力,有效提升开发效率。
· 最后一屏调试工具
TencentOS tiny 可以自动获取故障现场信息,并保持在端侧存储设备中,触发重启后会自动上传故障信息,可有效解决远程物联网设备故障信息获取难题,提升故障分析解决效率。
· 安全分级方案
TencentOS tiny 提供了多个等级的 IoT 安全方案。您可以根据业务场景和成本要求选择合适的安全解决方案,方便客户在安全需求和成本控制之间进行有效平衡。
2,云平台下发数据解析。
static void tos_topic_handler(void* client, message_data_t* msg)
{
(void) client;
cJSON* cjson_root = NULL;
cJSON* cjson_status = NULL;
cJSON* cjson_params = NULL;//add zyd
char* status = NULL;
// char* cmd_value = NULL; //add zyd
// char cmd_value = 0; //add zyd
k_event_flag_t event_flag = report_fail;
/* ��ӡ��־ */
MQTT_LOG_I("-----------------------------------------------------------------------------------");
MQTT_LOG_I("%s:%d %s()...\ntopic: %s, qos: %d. \nmessage:\n\t%s\n", __FILE__, __LINE__, __FUNCTION__,
msg->topic_name, msg->message->qos, (char*)msg->message->payload);
MQTT_LOG_I("-----------------------------------------------------------------------------------\n");
/* ʹ��cjson�����ϱ���Ӧ���� */
cjson_root = cJSON_Parse((char*)msg->message->payload);
if (cjson_root == NULL) {
printf("report reply message parser fail\r\n");
event_flag = report_fail;
goto exit;
}
/*解析 下发 指令 */
cjson_params = cJSON_GetObjectItem(cjson_root, "params");
if (cjson_params != NULL) {
cJSON* cjson_onoff = cJSON_GetObjectItem(cjson_params,"onoff");
if(cjson_onoff != NULL) car_cmd.onoff = cjson_onoff->valueint;
cJSON* cjson_drive = cJSON_GetObjectItem(cjson_params,"drive");
if(cjson_drive != NULL) car_cmd.drive = cjson_drive->valueint;
cJSON* cjson_reverse = cJSON_GetObjectItem(cjson_params,"reverse");
if(cjson_reverse != NULL) car_cmd.reverse = cjson_reverse->valueint;
cJSON* cjson_right = cJSON_GetObjectItem(cjson_params,"right");
if(cjson_right != NULL) car_cmd.right = cjson_right->valueint;
cJSON* cjson_left = cJSON_GetObjectItem(cjson_params,"left");
if(cjson_left != NULL) car_cmd.left = cjson_left->valueint;
}
/* ��ȡstatus״̬ */
cjson_status = cJSON_GetObjectItem(cjson_root, "status");
status = cJSON_GetStringValue(cjson_status);
if (cjson_status == NULL || status == NULL) {
printf("report reply status parser fail\r\n");
event_flag = report_fail;
goto exit;
}
/* �ж�status״̬ */
if (strstr(status,"success")) {
event_flag = report_success;
}else {
event_flag = report_fail;
}
exit:
cJSON_Delete(cjson_root);
cjson_root = NULL;
status = NULL;
tos_event_post(&report_result_event, event_flag);
return;
}复制
3,云平台上传数据。
void mqttclient_task(void)
{
int error;
int lightness = 0;
mqtt_client_t *client = NULL;
mqtt_message_t msg;
k_event_flag_t match_flag;
char host_ip[20];
memset(&msg, 0, sizeof(msg));
#ifdef USE_ESP8266
esp8266_sal_init(esp8266_port);
// esp8266_join_ap("TencentOS", "tencentostiny");
esp8266_join_ap("TP-LINK_AF26", "xn20190213");
// esp8266_join_ap("TP-LINK_EA9E", "20160130");
#endif
#ifdef USE_EC600S
ec600s_sal_init(HAL_UART_PORT_0);
#endif
mqtt_log_init();
client = mqtt_lease();
tos_event_create(&report_result_event, (k_event_flag_t)0u);
/* Domain Format: <your product ID>.iotcloud.tencentdevices.com */
tos_sal_module_parse_domain("O0CBVXMB0X.iotcloud.tencentdevices.com",host_ip,sizeof(host_ip));
/*
These infomation is generated by mqtt_config_gen.py tool in "TencentOS-tiny\tools" directory.
*/
mqtt_set_port(client, "1883");
mqtt_set_host(client, host_ip);
mqtt_set_client_id(client, "O0CBVXMB0XCar");
mqtt_set_user_name(client, "O0CBVXMB0XCar;21010406;12365;4294967295");
mqtt_set_password(client, "63d7adbf99fe8a2c93876da22dd150bdc6f78dea;hmacsha1");
mqtt_set_clean_session(client, 1);
error = mqtt_connect(client);
//MQTT_LOG_D("mqtt connect error is %#0x", error);
error = mqtt_subscribe(client, "$thing/down/property/O0CBVXMB0X/Car", QOS0, tos_topic_handler);
// MQTT_LOG_D("mqtt subscribe error is %#0x", error);
while (1) {
memset(&msg, 0, sizeof(msg));
// snprintf(report_buf, sizeof(report_buf), REPORT_DATA_TEMPLATE, lightness++);
snprintf(report_buf, sizeof(report_buf), REPORT_DATA_TEMPLATE, distance);
// if (lightness > 100) {
// lightness = 0;
// }
msg.qos = QOS0;
msg.payload = (void *) report_buf;
error = mqtt_publish(client, "$thing/up/property/O0CBVXMB0X/Car", &msg);
// MQTT_LOG_D("mqtt publish error is %#0x", error);
tos_event_pend(&report_result_event,
report_success|report_fail,
&match_flag,
TOS_TIME_FOREVER,
TOS_OPT_EVENT_PEND_ANY | TOS_OPT_EVENT_PEND_CLR);
if (match_flag == report_success) {
// printf("report to Tencent IoT Explorer success\r\n");
}else if (match_flag == report_fail){
// printf("report to Tencent IoT Explorer fail\r\n");
}
///
tos_task_delay(1000);
}
}复制
4,电机控制及超声波测距程序。(脉宽的测量程序这里参考野火i.MXRT1052开发板中例程)
#include "pin_mux.h"
#include "board.h"
#include "fsl_gpio.h"
#include "fsl_common.h"
#include "fsl_iomuxc.h"
#include "fsl_debug_console.h"
#include "clock_config.h"
#include "fsl_gpt.h"
#include "car_contrl.h"
#include "tos_k.h"
#include "pad_config.h"
#include "bsp_nvic.h"
//#define SR04_ECHO_GPIO GPIO1
//#define SR04_ECHO_GPIO_PIN 01U
#define SR04_TRIG_GPIO GPIO1
#define SR04_TRIG_GPIO_PIN 02U
/*******************************************************************************
* Variables
******************************************************************************/
/* Whether the SW is turned on */
volatile bool g_InputSignal = false;
/* Symbols to be used with GPIO driver */
#define MOTOR_D1_GPIO GPIO2 /*!< GPIO peripheral base pointer */
#define MOTOR_D1_GPIO_PIN 30U /*!< GPIO pin number */
/* Symbols to be used with GPIO driver */
#define MOTOR_D2_GPIO GPIO2 /*!< GPIO peripheral base pointer */
#define MOTOR_D2_GPIO_PIN 31U /*!< GPIO pin number */
/* Symbols to be used with GPIO driver */
#define MOTOR_B1_GPIO GPIO1 /*!< GPIO peripheral base pointer */
#define MOTOR_B1_GPIO_PIN 16U /*!< GPIO pin number */
/* Symbols to be used with GPIO driver */
#define MOTOR_B2_GPIO GPIO1 /*!< GPIO peripheral base pointer */
#define MOTOR_B2_GPIO_PIN 17U /*!< GPIO pin number */
#define MOTOR_REVERSE_EN() GPIO_PinWrite(MOTOR_D1_GPIO, MOTOR_D1_GPIO_PIN, 1U);\
GPIO_PinWrite(MOTOR_D2_GPIO, MOTOR_D2_GPIO_PIN, 0U);\
GPIO_PinWrite(MOTOR_B1_GPIO, MOTOR_B1_GPIO_PIN, 1U);\
GPIO_PinWrite(MOTOR_B2_GPIO, MOTOR_B2_GPIO_PIN, 0U)
#define MOTOR_DRIVE_EN() GPIO_PinWrite(MOTOR_D1_GPIO, MOTOR_D1_GPIO_PIN, 0U);\
GPIO_PinWrite(MOTOR_D2_GPIO, MOTOR_D2_GPIO_PIN, 1U);\
GPIO_PinWrite(MOTOR_B1_GPIO, MOTOR_B1_GPIO_PIN, 0U);\
GPIO_PinWrite(MOTOR_B2_GPIO, MOTOR_B2_GPIO_PIN, 1U)
#define MOTOR_RIGHT_EN() GPIO_PinWrite(MOTOR_B1_GPIO, MOTOR_B1_GPIO_PIN, 0U);\
GPIO_PinWrite(MOTOR_B2_GPIO, MOTOR_B2_GPIO_PIN, 1U)
#define MOTOR_LEFT_EN() GPIO_PinWrite(MOTOR_D1_GPIO, MOTOR_D1_GPIO_PIN, 0U);\
GPIO_PinWrite(MOTOR_D2_GPIO, MOTOR_D2_GPIO_PIN, 1U)
#define MOTOR_STOP() GPIO_PinWrite(MOTOR_D1_GPIO, MOTOR_D1_GPIO_PIN, 0U);\
GPIO_PinWrite(MOTOR_D2_GPIO, MOTOR_D2_GPIO_PIN, 0U);\
GPIO_PinWrite(MOTOR_B1_GPIO, MOTOR_B1_GPIO_PIN, 0U);\
GPIO_PinWrite(MOTOR_B2_GPIO, MOTOR_B2_GPIO_PIN, 0U);
#define SR04_TRIG_ON() GPIO_PinWrite(SR04_TRIG_GPIO, SR04_TRIG_GPIO_PIN, 1U);
#define SR04_TRIG_OFF() GPIO_PinWrite(SR04_TRIG_GPIO, SR04_TRIG_GPIO_PIN, 0U);
//*****************//
ctrl_cmd_t car_cmd;
volatile uint64_t timer = 0;
volatile int distance = 0;
int trig_cnt = 0;
// 定时器输入捕获用户自定义变量结构体定义
volatile GPT_ICUserValueTypeDef GPT_ICUserValueStructure = {0,0,0,0,0};
/**
* @brief 配置GPT相关引脚功能
* @param 无
* @retval 无
*/
void GPT_GPIO_Config(void)
{
/*定义GPIO引脚配置结构体*/
gpio_pin_config_t gpt_config;
IOMUXC_SetPinMux(IOMUXC_GPIO_EMC_40_GPT2_CAPTURE2, 0U);
IOMUXC_SetPinConfig(IOMUXC_GPIO_EMC_40_GPT2_CAPTURE2, GPT_COMPARE_PAD_CONFIG_DATA);
gpt_config.direction = kGPIO_DigitalInput; //输入模式
//gpt_config.outputLogic = 0; //默认高电平
gpt_config.interruptMode = kGPIO_NoIntmode; //不使用中断
/* 初始化 GPT COMPARE1 GPIO. */
GPIO_PinInit(GPT2_CAPTURE2_GPIO, GPT2_CAPTURE2_GPIO_PIN, &gpt_config);
}
/**
* @brief 配置GPT工作模式
* @param 无
* @retval 无
*/
void GPT_Config(void)
{
gpt_config_t gptConfig;
/*初始化GPT引脚*/
GPT_GPIO_Config();
/*GPT的时钟设置*/
CLOCK_SetMux(kCLOCK_PerclkMux, EXAMPLE_GPT_CLOCK_SOURCE_SELECT);
CLOCK_SetDiv(kCLOCK_PerclkDiv, EXAMPLE_GPT_CLOCK_DIVIDER_SELECT);
/*初始化GPT*/
GPT_GetDefaultConfig(&gptConfig);
GPT_Init(EXAMPLE_GPT, &gptConfig);
/* 设置时钟分频 */
GPT_SetClockDivider(EXAMPLE_GPT, GPT_DIVIDER);
/*设置位输入模式*/
GPT_SetInputOperationMode(EXAMPLE_GPT,kGPT_InputCapture_Channel2,kGPT_InputOperation_RiseEdge);
/*使能输入捕获中断*/
GPT_EnableInterrupts(EXAMPLE_GPT, kGPT_InputCapture2InterruptEnable);
/*使能溢出中断*/
GPT_EnableInterrupts(EXAMPLE_GPT,kGPT_RollOverFlagInterruptEnable);
/*设置中断优先级,*/
set_IRQn_Priority(GPT_IRQ_ID,Group4_PreemptPriority_6, Group4_SubPriority_0);
/*使能中断*/
EnableIRQ(GPT_IRQ_ID);
/* 开启定时器 */
GPT_StartTimer(EXAMPLE_GPT);
}
/*定义中断服务函数*/
void EXAMPLE_GPT_IRQHandler(void)
{
//tos_knl_irq_enter();
//PRINTF("GPIO_GetPinsInterrupt_zyd3333\r\n");
/*
*当要被捕获的信号的周期大于定时器的最长定时时,定时器就会溢出,产生更新中断
*这个时候我们需要把这个最长的定时周期加到捕获信号的时间里面去
*/
if ( GPT_GetStatusFlags(EXAMPLE_GPT,kGPT_RollOverFlag) != false )
{
if ( GPT_ICUserValueStructure.Capture_StartFlag != 0 )
{
GPT_ICUserValueStructure.Capture_Period ++;
}
GPT_ClearStatusFlags(EXAMPLE_GPT, kGPT_RollOverFlag);
}
/*捕获中断*/
if (GPT_GetStatusFlags(EXAMPLE_GPT,kGPT_InputCapture2Flag) != false)
{
if(GPT_ICUserValueStructure.Capture_FinishFlag != 1)
{
/*第一次捕获*/
if ( GPT_ICUserValueStructure.Capture_StartFlag == 0 )
{
/*清除溢出次数*/
GPT_ICUserValueStructure.Capture_Period = 0;
/*读取当前计数值*/
GPT_ICUserValueStructure.Capture_CcrValue_1 = GPT_GetInputCaptureValue(EXAMPLE_GPT,kGPT_InputCapture_Channel2);
//PRINTF("GPIO_GetPinsInterrupt_zyd1111 RiseEdge %d \r\n",GPT_ICUserValueStructure.Capture_CcrValue_1);
/*当第一次捕获到上升沿之后,就把捕获边沿配置为上升沿*/
GPT_SetInputOperationMode(EXAMPLE_GPT,kGPT_InputCapture_Channel2,kGPT_InputOperation_FallEdge);
/*开始捕获标志置1*/
GPT_ICUserValueStructure.Capture_StartFlag = 1;
}
/*上升沿捕获中断,第二次捕获*/
else
{
/*获取捕获比较寄存器的值,这个值就是捕获到的高电平的时间的值*/
GPT_ICUserValueStructure.Capture_CcrValue_2 = GPT_GetInputCaptureValue(EXAMPLE_GPT,kGPT_InputCapture_Channel2);
//PRINTF("GPIO_GetPinsInterrupt_zyd2222 FallEdge%d \r\n",GPT_ICUserValueStructure.Capture_CcrValue_2);
/*当第二次捕获到上升沿之后,就把捕获边沿配置为下降沿,好开启新的一轮捕获*/
GPT_SetInputOperationMode(EXAMPLE_GPT,kGPT_InputCapture_Channel2,kGPT_InputOperation_RiseEdge);
/*开始捕获标志清0*/
GPT_ICUserValueStructure.Capture_StartFlag = 0;
/*捕获完成标志置1 */
GPT_ICUserValueStructure.Capture_FinishFlag = 1;
}
}
GPT_ClearStatusFlags(EXAMPLE_GPT, kGPT_InputCapture2Flag);
}
//tos_knl_irq_leave();
}
void delay(uint32_t count)
{
volatile uint32_t i = 0;
for (i = 0; i < count; ++i)
{
__asm("NOP");
}
}
void motor_ctrl_entry(void *arg)
{
/*初始化并开启GPT定时器*/
GPT_Config();
SR04_TRIG_ON();
delay(2000);//20us
SR04_TRIG_OFF();
while (1) {
if (car_cmd.onoff){
USER_LED_ON();
}else{
USER_LED_OFF();
}
if ((car_cmd.drive)&&(distance>=300)){
MOTOR_DRIVE_EN();
}else if(car_cmd.reverse){
MOTOR_REVERSE_EN();
}else if(car_cmd.right){
MOTOR_RIGHT_EN();
}else if(car_cmd.left){
MOTOR_LEFT_EN();
}else{
MOTOR_STOP();
}
trig_cnt++;
if(GPT_ICUserValueStructure.Capture_FinishFlag)
{
/*得到计数值,timer 为64位数据,32位很可能会溢出*/
timer = GPT_ICUserValueStructure.Capture_Period * 0xffffffff;
timer += GPT_ICUserValueStructure.Capture_CcrValue_2;
timer -= GPT_ICUserValueStructure.Capture_CcrValue_1;
/*将计数值转化为时间,单位(ms)*/
//timer = timer / ((EXAMPLE_GPT_CLK_FREQ)/1000); //单位ms
timer = (172*timer) / ((EXAMPLE_GPT_CLK_FREQ)/1000);//单程声速 344/2 =172 距离单位mm
distance =(int)(timer);
//PRINTF("the result is: %lld ms \r\n",timer);
PRINTF("the result is: %lld ms \r\n",distance);
GPT_ICUserValueStructure.Capture_FinishFlag = 0;
SR04_TRIG_ON();
delay(2000);//20us
SR04_TRIG_OFF();
trig_cnt = 0;
}
if(trig_cnt>10)
{
trig_cnt = 0;
SR04_TRIG_ON();
delay(2000);//20us
SR04_TRIG_OFF();
}
//PRINTF("###I am task1 %d \r\n",GPT_ICUserValueStructure.Capture_Period);
tos_task_delay(20);
}
}复制
六,腾讯连连H5面板。
1,电脑端调试界面。
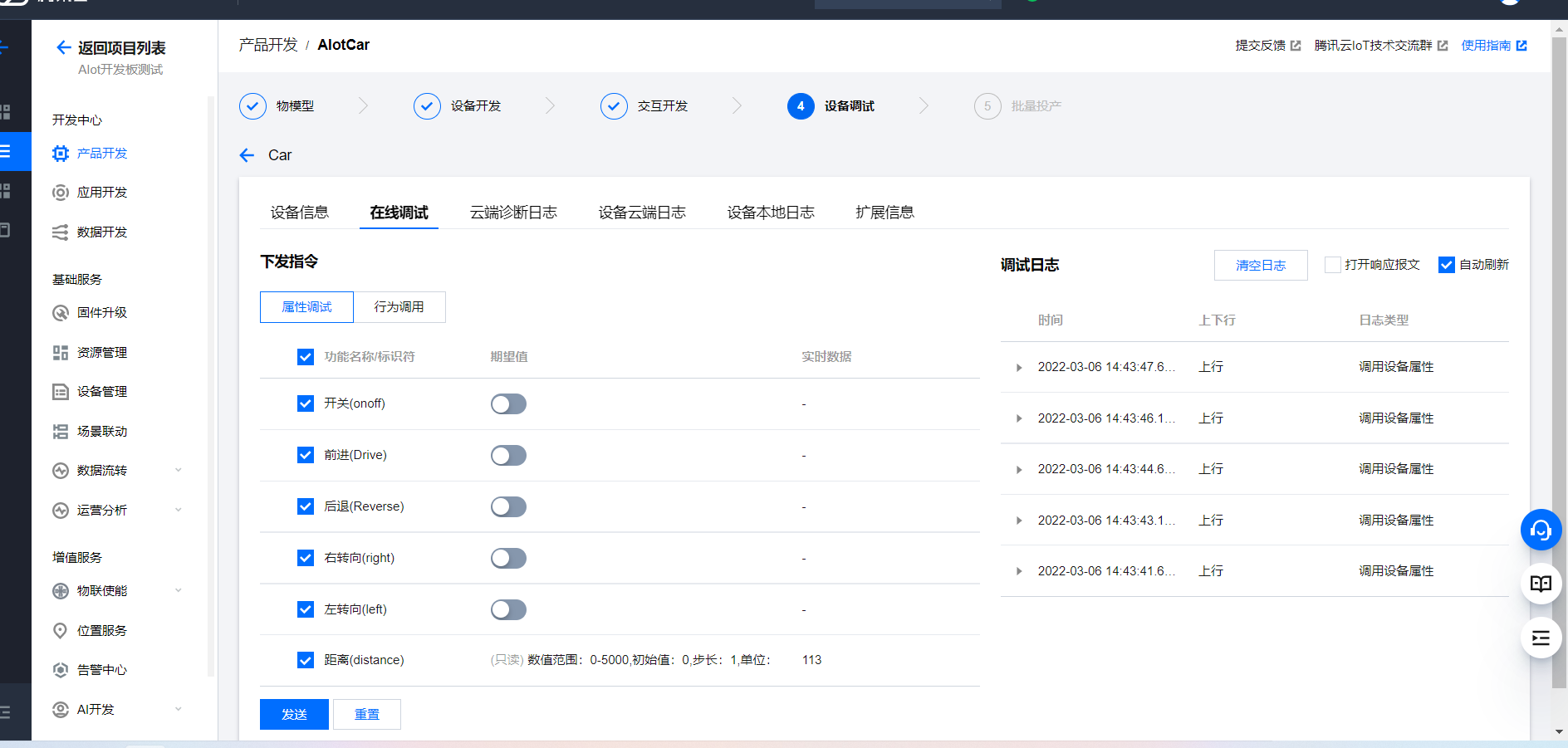
调试界面
2,手机端界面。
这里用的是标准面板,使用方法还是很简单的,不过界面和功能有待优化,有时间使用SDK开发,应该就会非常好了。

手机端
七,总结。
以前很少接触物联网方面的项目,随着物联网的普及应用,以后工作中可能会大量用到,通过这个项目,确实学到了很多知识,受益良多。自己按照教程,移植TencentOS Tiny 内核,仅仅几个步骤,非常简单。腾讯云IoT explorer平台初次使用,利用H5标准面板,上手非常快。工作中一直使用NXP的单片机,可以说非常有感情,如果能得到一块RT1062开发板,内心也是无限满足了,哈哈。
这次开发用的是NXP官方的开发工具MCUXpresso IDE ,用惯了keil,刚开始使用不太顺手,不过用习惯了,还是很好用的,功能非常强大。最重要的是keil是要版权的,官方能提供免费的IDE,真的该多多支持。
由于时间太紧,好多功能没来的及做,后面,有时间会继续完善,继续学习TencentOS Tiny和RT1062。
原创声明,本文系作者授权云+社区发表,未经许可,不得转载。
如有侵权,请联系 [email protected] 删除。
智能推荐
android 视图动画遇到的坑_android view有动画时执行invisible-程序员宅基地
文章浏览阅读1.6k次。Android中视图动画使用率越来越少了,很多大神都使用属性动画了。但个人觉得视图动画比属性动画使用起来更简单,所以能用视图动画实现的就不考虑用属性动画。 今天在项目中使用视图动画时,遇到了几个坑,记录下来,供踩到同样坑的同学参考一下~一、平移与缩放冲突 使用视图动画,常使用到动画集合AnimationSet,然后在动画集合中添加平移、绽放,旋转等动画。_android view有动画时执行invisible
Anaconda新手使用教程_anaconda使用教程-程序员宅基地
文章浏览阅读4.6w次,点赞102次,收藏897次。Anaconda使用教程一(新手友好)前言一、python和包以及anaconda的概念关系关于python与包关于anaconda二、Anaconda安装问题对windows三、Anaconda使用问题配置Anaconda源可能出现的错误conda install 仍然出现下载速度慢的错误四、Anaconda创建虚拟环境并使用创建你的第一个环境查看当前conda所有环境激活你的环境在你的环境中用conda或者pip安装包查看环境中现有的包在环境中运行python程序(windows系统)退出当前环境删除环_anaconda使用教程
hdu 3496 二维费用背包_hdu - 3496-程序员宅基地
文章浏览阅读1k次。题意:求在一定l时间内看完n中电影中的m是否可能,若可能则最后快乐度是多少。之前错了好多遍,一直找不到原因,后来在百度上看了很多别人的代码发现只有初始化不同我的初始化: memset(f,0,sizeof(f));别人的: for(int i=0;i for(int j=0;j一开始认为没什么影响,但是苦于一直找不到原因,所以我将自_hdu - 3496
Random、SecurityRandom、Math.random()_securerandom和math.random()-程序员宅基地
文章浏览阅读2k次。下面可以不看,一句话,为了其安全起见,以后我们就用SecurityRandom就好了。JDK中有两个随机数类。一个是PRNG,也就伪随机数类java.util.Random,是采用线性同余算法产生的。另一个是RNG,也就是java.util.Random的子类强随机数java.security.SecureRandom,这是一个SPI类,也就是说具体的算法由Pro..._securerandom和math.random()
npm安装vue报错:npm ERR! code ETIMEDOUT-程序员宅基地
文章浏览阅读8k次,点赞8次,收藏8次。npm安装vue报错npm ERR! code ETIMEDOUT_code etimedout
Linux解决Warning: mysql_connect(): Headers and client library minor version mismatch. 警告_mysql headers:50647-程序员宅基地
文章浏览阅读5k次。这两天用阿里云服务器重新部署网站服务器后,打开某php页面出现了如下警告:Warning: mysql_connect(): Headers and client library minor version mismatch. Headers:50547 Library:50631 in /XXX(某某目录)/wp-db.php on line 1520,虽然是警告,但是有的界面会因此打不开,无法..._mysql headers:50647
随便推点
上手指南 | Jetpack Hilt 依赖注入框架_hilt 使用 broadcastreceiver-程序员宅基地
文章浏览阅读2.7k次,点赞5次,收藏6次。Hilt 是 Android 的依赖注入库,是基于 Dagger 。可以说 Hilt 是专门为 Andorid 打造的。_hilt 使用 broadcastreceiver
php 解压安装程序,解压缩各种安装程序包-程序员宅基地
文章浏览阅读97次。解压缩各种安装程序包文:tracky来源:http://bbs.hanzify.org/index.php?showtopic=24638&hl=点击:2578解压缩各种安装程序包1 微软的Installer制作的安装包,后缀一般是msi,mspA 可以用totalcmd 的msiplus插件,可以解压。不可以修改msi。B 可以用WinINSTALL LE 2003,在w..._php软件压缩包安装
ChatGPT-GPT4:提升科研、论文写作与AI绘图效率的新契机_最新chatgpt/gpt4科研技术应用与ai绘图及论文高效写作-程序员宅基地
文章浏览阅读295次。2023年我们进入了AI2.0时代。微软创始人比尔盖茨称ChatGPT的出现有着重大历史意义,不亚于互联网和个人电脑的问世。360创始人周鸿祎认为未来各行各业如果不能搭上这班车,就有可能被淘汰在这个数字化时代,如何能高效地处理文本、文献查阅、PPT编辑、编程、绘图和论文写作已经成为您成功的关键。而 ChatGPT,作为一种强大的自然语言处理模型,具备显著优势,能够帮助您在各个领域取得突破。ChatGPT 在论文写作与编程方面也具备强大的能力。_最新chatgpt/gpt4科研技术应用与ai绘图及论文高效写作
Nginx---静态资源处理_nginx静态资源释放-程序员宅基地
文章浏览阅读2.5k次。NginxNginx服务器基础配置实例Nginx服务操作的问题Nginx配置成系统服务Nginx命令配置到系统环境Nginx静态资源部署Nginx静态资源概述Nginx静态资源的配置指令listen指令default_server说明server_name指令配置方式一:精确匹配配置方式二:使用通配符配置配置三:使用正则表达式配置匹配执行顺序server_name总结location指令设置请求资源的目录root / aliasindex指令error_page指令静态资源优化配置语法sendfile,用来开_nginx静态资源释放
U盘使用TransMac软件格式化之后用不了,已解决!_transmac格式化u盘导致无法读取-程序员宅基地
文章浏览阅读2.9w次,点赞2次,收藏4次。有一天,上网查查Android的知识点(我是初学者),不经意的碰到黑苹果这个概念,因为没用过白苹果,所以有个想折腾的想法,于是从此深入大坑。教程是网上的,是用TransMac格式化的U盘,后面折腾了半天,启动卡在苹果LOGO,生命在于折腾。我不怕。。。。。—___—这个是题外话了。后面因为要用到U盘(不是黑苹果的事了),突然发现U盘用不了了,格式化也不行,用DG也不行(有人说可以),然后网上找..._transmac格式化u盘导致无法读取
毕设问题杂谈_blender怎么解除蒙皮-程序员宅基地
文章浏览阅读3k次。一、maya模型通过mixamo绑定后,发现有模型重叠需要删改,在Maya中删除后导出fbx后总是空集。发现是个fbx导出问题,MAYA做了动画的模型导出FBX,动画好好的,但部分模型没了???【maya吧】_百度贴吧这样操作后会取消蒙皮绑定,于是我去blender里 通过betterfbx插件导入,在编辑模式中删除了多余模型,之后再betterfbx导出,fbx模型绑定都在,进入unity也没问题,应该就是个Mayafbx插件问题。(小白见解)二、..._blender怎么解除蒙皮