何为模糊PID:链接 模糊PID理论基础:链接 二自由度机械臂运动建模: 末端位置E(x,y),则两个关节角度可以由下式求得: theta1=atan2(y,x); % theta1=acos(x/sqrt(x*x+y*y)); c=sqrt(x*x+y*y); % 末端到...
”PID控制器“ 的搜索结果
PID参数调节口诀 参数整定找最佳, 从小到大顺序查。 先是比例后积分, 最后再把微分加。 曲线振荡很频繁, 比例度盘要放大。 曲线漂浮绕大弯, 比例度盘往小扳。 曲线偏离回复慢, 积分时间往下降。 曲线波动周期长...


基于stm32的直流电机串级PID控制,做速度位置控制
本文主要讲解常用的控制算法PID控制的原理、参数整定以及斯坦利控制的原理,最后讲解PID、Stanley控制控制的代码。以上就是今天要讲的内容,本文介绍了PID控制、Pure Pursuit 控制和Stanley控制,同时讲解了比较常用...

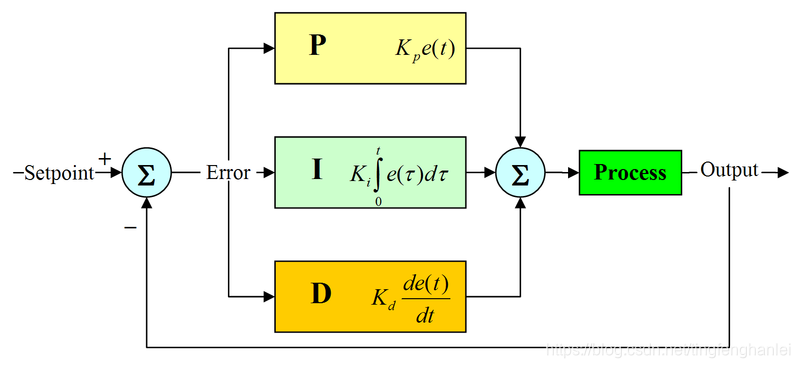
引言 最近碰到一个项目需要用到PID控制算法,于是在网上找了一些资料学习了一下,发现网上对于PID算法的Matlab仿真方面的内容比较少,所以我...PID控制器的基本结构如下图所示,G(s)为被控对象的系统传递函数。 ...
simulink学习笔记:基于模型的控制和pid整定
PID调节器是一个在工业控制应用中常见的反馈回路部件,PID是以它的三种纠正算法而命名...这种控制器输出的变化与输入控制器的偏差成比例关系。比如说,一个电热器的控制器的比例尺范围是10°C,它的预定值是20°C。...

stm32hal库pid控制双电机

PID 控制器由比例环节(Proportional)、积分环节(Integral )和微分环节(Differential )组成,连续PID 控制器的一般形式:dt de K d e K t e K t u D tI p )()()()()(0τττ++=? 一、比例控制及性能分析比例控制器的...
PID控制应该算是非常古老而且应用非常广泛的控制算法了,小到热水壶温度控制,大到控制无人机的飞行姿态和飞行速度等等。在电机控制中,PID算法用的尤为常见。
PID 算法详细介绍
标签: 算法
比例(Proportion)积分(Integral)微分(Differential)控制器(PID控制器或三项控制器)是一种采用反馈的控制回路机制,广泛应用于工业控制系统和需要连续调制控制的各种其他应用。
总之,频率响应法需要对系统的频率响应曲线进行分析,并结合PID控制器的工作原理和PID参数对系统的影响,确定合适的PID参数。具体实现中,比例参数Kp控制着输出量与温度偏差的比例,积分参数Ki控制着输出量与温度...
离散式PID

基于模糊自适应控制理论, 设计了一种模糊自适应PID 控制器, 具体介绍了这种PID 控制 器的控制特点及参数设计规则, 实现PID 控制器的在线自整定和自调整。通过matlab 软件进行实例 仿真表明, 这种模糊自适应PID 控制...
内容介绍原文档由会员 霜天盈月 发布离散系统的数字PID控制仿真本文共计33页,14252字;摘 要近年来,由于脉冲技术、数字式元部件、数字计算机,特别是微处理器的蓬勃发展,数字控制器在许多场合取代了模拟控制器。...

自适应模糊PID控制将模糊控制与传统PID控制相结合,将两种控制方式进行结合,取长补短,对传统的算法进行优化,形成一种新的控制算法,自适应模糊PID控制可以用于很多场景,比如温度控制,机器人控制,过程控制等等...
使用Simulink做最基础的PID控制仿真
PID算法C实现1、PID算法简介1.1、各个环节的作用2、位置型PID算法2.1、离散表达形式:2.2、位置型代码2.3、测试效果3、增量型PID算法3.1 、离散表达式:3.2 增量型代码3.3、效果展示4、积分分离的PID控制算法4.1、...
PID控制算法基础介绍
标签: 嵌入式

在自动控制中,PID及其衍生出来的算法是应用最广的算法之一。各个做自动控制的厂家基本都有会实现这一经典算法。我们在做项目的过程中,也时常会遇到类似的需求,所以就想实现这一算法以适用于更多的应用场景。...
bp神经网络用于PID控制器,训练bp网络实现PID的智能控制
推荐文章
- 大数据和云计算哪个更简单,易学,前景比较好?_大数据和云计算哪个好-程序员宅基地
- python操作剪贴板错误提示:pywintypes.error: (1418, 'GetClipboardData',线程没有打开的剪贴板)...-程序员宅基地
- IOS知识点大集合_ios /xmlib.framework/headers/xmmanager.h:66:32: ex-程序员宅基地
- Android Studio —— 界面切换_android studio 左右滑动切换页面-程序员宅基地
- 数据结构(3):java使用数组模拟堆栈-程序员宅基地
- Understand_6.5.1175::New Project Wizard_understand 6.5.1176-程序员宅基地
- 从零开始带你成为MySQL实战优化高手学习笔记(二) Innodb中Buffer Pool的相关知识_mysql_global_status_innodb_buffer_pool_reads-程序员宅基地
- 美化上传文件框(上传图片框)_文件上传框很丑-程序员宅基地
- js简单表格操作_"var str = '<table border=\"5px\"><tr><td>序号</td><-程序员宅基地
- Power BI销售数据分析_powerbi汇总销售人员业绩包括无销售记录的人-程序员宅基地