EVO评估Vins-Mono
标签: 自动驾驶
Evo评估Vins-Mono结果
标签: 自动驾驶
Evo评估Vins-Mono结果
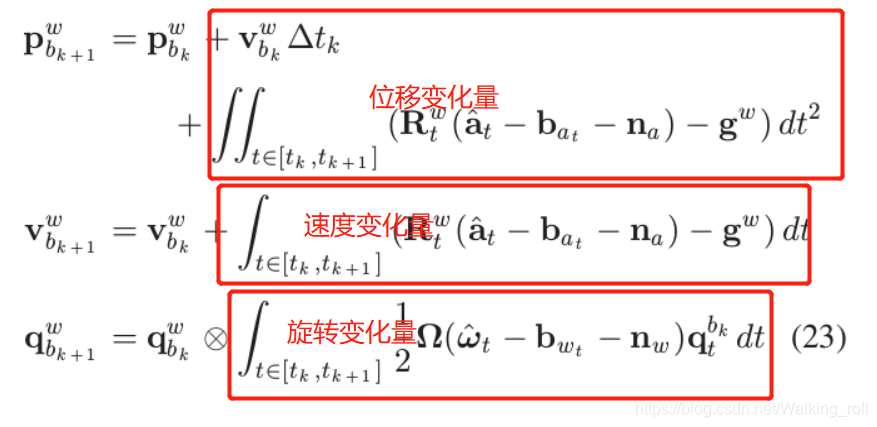
VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator. Quaternion Kinematics for Error-State KF. 预积分的推导 预积分是VINS-Mono中十分重要的一个步骤,主要涉及的是IMU的运动...
最近准备学习VINS-Mono,记录一下运行代码时遇到得问题,供大家参考。一开始我安装的是ubuntu 20.04 + ros noetic,代码编译成功以后,执行 roslaunch vins_estimator euroc.launch , feature_tracker-* 和 pose_...
VINS-MONO运行自己的数据
标签: 算法 ios
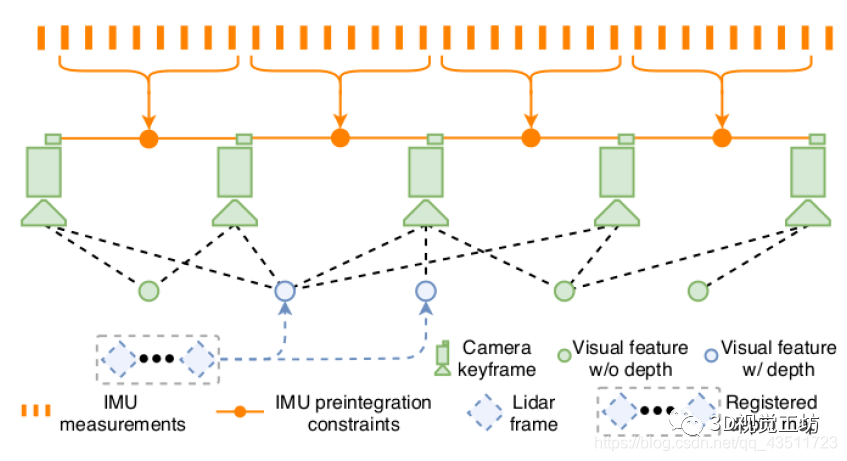
我们在第三节中对完整的系统框架进了概述。在第四节中给出了视觉和预处理IMU测量的预处理步骤。在第五节中,我们讨论了估计器的初始化过程。在第六节中提出了种紧耦合、
VINS-Mono代码分析总结参考文献前言??视觉与IMU融合的分类:松耦合和紧耦合:按照是否把图像的Feature加入到状态向量区分,换句话说就是松耦合是在视觉和IMU各自求出的位姿的基础上做的耦合。滤波法和优化法:参考??...

Vins-Mono预积分相关的公式和代码可以在各个博客中找到。本文将充当一个帮助大家快速理解预积分、中值积分相关概述的角色,带大家理解代码,应对面试。
这个系统是基于香港科技大学飞行机器人组的开源框架VINS-Mono开发的,原开源框架是针对单目SLAM。本双目SLAM系统是在原单目开源框架基础上的二次深度开发,外部接口与原框架一致。这个项目是我的研究课题项目,非...
最近开始学习VINS-Mono系统源码,也看到了网上有许多别人的的阅读笔记和代码介绍资料。对我自己而言,阅读前人的笔记能够很快帮助自己加深对系统以及代码的整体理解。但是,自己也要写阅读笔记,这样在写的过程中能...

编译VINS-Mono出现问题解决及正确建立ROS工作空间下的文件编译操作
初始化大致流程 如果IMU和相机之间的外参未知,则需要在线标定求解旋转量qbc。 利用求解出来的qbc,结合相机间的约束,求解IMU角速度的bias。 利用IMU的运动估计重力,速度以及尺度。 利用重力的模长矫正重力,...

小白VINS-Mono代码学习_1一、 VINS-Mono/feature_tracker/src/parameters.cpp 从feature_tracker_node.cpp开始读整个程序,先看main函数,上来就是 readParameters(n); void readParameters(ros::NodeHandle &n...

VINS-Mono融合轮速计和GPS(三):优化和在线标定开篇理论目标函数IMU约束1. 残差2. 优化变量3. Jacobian4. 协方差实践配合代码查看 开篇 最近在学习多传感器融合技术,本着重复造轮子的精神,做了一个VINS-Mono融合...

点击上方“AI算法修炼营”,选择加星标或“置顶”标题以下,全是干货一、本系列概述本系列旨在对前一阶段学习vins-mono开源框架的总结。结合暑假秋招之前报名的深蓝学院的《从零开始手写V...
VINS-MONO的初始化主要分为两个部分:纯视觉的SFM和视觉惯导联合。这篇主要写SFM,下一篇写视觉惯导联合。 首先用视觉的SFM求解滑窗内所有帧的位姿,和所有路标点的3D位置,然后跟IMU预积分的值对齐,求解重力方向、...


feature_tracker是vins的前端,它的目录在src/ feature_tracker下,功能主要是获取摄像头的图像帧,并按照事先设定的频率,把cur帧上满足要求的特征点以sensor_msg::PointCloudPtr的格式发布出去,以便RVIZ和vins...

VINS-Mono融合轮速计和GPS(一):鲁棒初始化系统开篇原理命名法公式推导配合代码查看 开篇 原理 命名法 公式推导 配合代码查看
vins-mono里主要涉及三个坐标系:word坐标系,body坐标系即IMU帧坐标系,cam坐标系即相机帧坐标系。 对于单目系统而言,初始化时就会确定世界坐标系。 首先进行纯视觉初始化(SFM): 注意,这里把c0帧作为基础帧,...
VINS-Fusion解析——流程 iwander。 2020-03-13 11:27:32 955 收藏 7 分类专栏: 机器视觉 版权 ...VINS-Fusion分析 ...vins-fusion不像mono那样有三个node,它只有一个node,在rosNodeTest.cpp里。我推测之
