来自 Vijay Kumar 的标志设计 代码: VIJAY-KUMAR 该标志使用源自泰米尔纳德邦的传统艺术形式 Sikku Kolam 的图案描绘了字母“Py”。 如果您喜欢它,请随时改进它。 ... 剪辑 ... 此变体的一些优点: 徽标现在是...
”Vijay-Kumar“ 的搜索结果
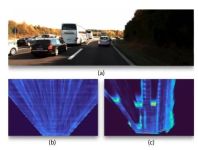
本文为《程序员》原创文章,未经允许不得转载,更多精彩文章请订阅2016年《程序员》 记者:徐威龙 提到无人机,有人也许会想到巡航在海上的大型的军用武器,而近年来,随着消费级无人机的技术革新和价格优势,这...
Paravitorgabeh博士,Vijay Kumar Naidu Velagala博士,Megan Levis博士和Qinfeng Wu博士提供了与该项目相关的技术援助和科学讨论。 本手稿的工作得到了NIH Grant R35GM124935,NSF授予的CBET-1553826,西北大学颁发...
这是论文的源代码:Gaurav Dhiman 和 Vijay Kumar。 “斑点鬣狗优化器:一种用于工程应用的新型生物启发式元启发式技术。” 工程软件进展 114 (2017):48-70。 https://doi.org/10.1016/j.advengsoft.2017.05.014 ...
{Kumar B G, Vijay and Carneiro, Gustavo and Reid, Ian}, title = {Learning Local Image Descriptors With Deep Siamese and Triplet Convolutional Networks by Minimising Global Loss Functions}, booktitle =...
《高压直流输电与柔性交流输电控制装置-静止换流器在电力系统中的应用(HVDC and FACTS Controllers:Applications of Static Converters in Power Systems)》-苏德(Vijay Kumar Sood)-第1版-英文版
1, TITLE:Automatic Landmarks Correspondence Detection in Medical Images with An Application to Deformable Image Registration AUTHORS: Monika Grewal ; Jan Wiersma ; Henrike Westerveld ;...
自我监督学习已成为AI社区中令人兴奋的方向。 Jitendra Malik: "Supervision is the opium of the AI researcher" Alyosha Efros: "The AI revolution will not be supervised" Yann LeCun: "self-supervised ...
Kali Linux 是一款基于 Debian 的发行版,这意味着它拥有强大的社区支持和丰富的软件资源。它被设计为具有快速、轻量级的特性,特别适合在虚拟机和闪存驱动器上运行。Kali Linux 的目标是成为网络和安全专业人士的...

文章目录1.算法简介2.算法调试3.代码解读3.1 前端 ImageProcessor3.2 后端 Msckf-Vio 1.算法简介 Mingyang Li博士于2007年提出MSCKF (Multi-State Constraint Kalman Filter),一直是filter-based SLAM的经典之作....

人们已经提出了许多软件平台,有时称为中间件,引入了模块化和适应性强的功能,使构建机器人系统变得更加容易。随着时间的推移,一些中间件已经发展成为包含实用程序、算法和示例应用程序的丰富生态系统。...

目录 SLAM领域著名实验室 1. 苏黎世联邦理工学院 2. 明尼苏达大学 3. 慕尼黑工业大学 4. 香港科技大学 ...7. 中科院自动化研究所国家模式识别实验室Robot Vision Group ...8. 清华大学自动化系宽带网络与数字媒体实验...
7791用于新视图合成的视图独立生成对抗网络徐晓刚1陈颖聪1贾佳雅1,21香港中文大学2腾讯优图实验室{xgxu,ycchen,leojia}@ cse.cuhk.edu.hk摘要从2D图像合成新视图需要转换3D结构并从新的视点将其投影回2D在本文中...
15741走向类人之握:基于物体-手语义表示的灵巧抓取孙天强朱日娜吴祥波林毅*大连理工大学{zhutq,hswrn}@ mail.dlut.edu.cn,{linxbo,lslwf}@dlut.edu.cn图1:左侧显示了物体的功能区域,每个功能区域都标注了语义...
10023学习联合2D-3D表示用于深度完成Yun Chen1 Bin Yang1,2 Ming Liang1 Raquel Urtasun1,21Uber Advanced Technologies Group2多伦多大学{yun.chen,byang10,ming.liang,urtasun}@ uber.com摘要本文研究了RGBD...
3741用于不可见属性-对象识别的昆伟1,杨木丽1,王浩1,邓成1,2,刘祥龙3,1西安电子科技大学电子工程学院西安2腾讯人工智能实验室,深圳5180573北京航空航天大学软件开发环境国家重点实验室,北京100191{weikunsk...
https://blog.csdn.net/Fate_fjh/article/details/52882134 转载于:https://www.cnblogs.com/TheKat/p/9075344.html
{jaime.spencer, r.bowden, s.hadfield}@surrey.ac.uk144020DeFeat-Net: 通过同时无监督表示学习进行通用单目深度估计0Jaime Spencer, Richard Bowden, Simon Had�eldSurrey大学视觉、语音和信号处理中心...

【深蓝学院】移动机器人运动规划--第6章 模型预测控制(MPC)与运动规划--笔记
开集世界中的贝叶斯语义实例Trung Pham、Vijay Kumar B G、Thanh-ToanDo、Gustavo Carneiro和Ian Reid阿德莱德大学计算机科学学院{trung.pham,vijay.kumar,thanh-toan.do,gustavo.carneiro,ian.reid}@adelaide....
【深蓝学院】移动机器人运动规划--第4章 动力学约束下的运动规划--笔记

用最小SNAP产生无人机平滑轨迹,控制器选用的是PD控制器,主要实验轨迹生成部分,其他部分可以参照Vijay Kumar的课程
视觉语言模型(VLM)通常由一个视觉编码器(如 CLIP)和一个语言模型(LM)组成,前者解释编码特征,后者解决下游任务。尽管取得了显著进展,但由于视觉编码器的能力有限,VLM 仍然存在一些缺陷,例如对某些图像特征...
推荐文章
- Unity3D 导入资源_unity怎么导入压缩包-程序员宅基地
- jqgrid 服务器端验证,javascript – jqgrid服务器端错误消息/验证处理-程序员宅基地
- 白山头讲PV: 用calibre进行layout之间的比对-程序员宅基地
- java exit方法_Java:如何测试调用System.exit()的方法?-程序员宅基地
- 如何在金山云上部署高可用Oracle数据库服务_rman target sys/holyp#ssw0rd2024@gdcamspri auxilia-程序员宅基地
- Spring整合Activemq-程序员宅基地
- 语义分割入门的总结-程序员宅基地
- SpringBoot实践(三十五):JVM信息分析_怎样查看springboot项目的jvm状态-程序员宅基地
- 基于springboot+vue的戒毒所人员管理系统 毕业设计-附源码251514_戒毒所管理系统-程序员宅基地
- 【LeetCode】面试题57 - II. 和为s的连续正数序列_leet code 和为s的正数序列 java-程序员宅基地