1) 什么是镜头的焦距?——(难度:中等) 答: 从光学原理来讲焦距就是从焦点到透镜中心的距离。即焦距长度。如"f=8-24mm,",就是指镜头的焦距长度为8-24mm 2) CCTV的含义是什么?——(难度:中等) ...
”摄像机校正“ 的搜索结果
摄像机标定误差包括内参(4个)、畸变参数(径向和切向共5个)、外参(平移和旋转共6个)。 误差参数分析:摄像机模型采用针孔模型成像模型,由于中心轴安装问题,这就造成了精度误差,就是所谓的相机内参数误差,...
camera_calibration_tool中文博客: : camera_calibration_tool用于使用opencv-python轻松地校准和校正摄像机。 仅需一行命令,您就可以获取摄像机的参数或校正视频。 与ROS的校准包相似。内容要求该代码在以下环境...
1.标定: 首先要制作一个标定板,OpenCV包里有一个黑白棋盘标定板,直接A4纸打印就OK了。然后用需要标定的摄像头拍几张照片(注意:要从不同角度多拍几张,我用了22张。标定板上的点个的个数为54,一行9个,一列6个...
通过使用图像特征,如直线等几何不变性,并基于场景中的直线经过透视投影变换后所成的图像仍是直线的事实... 可量测的非线性摄像机镜头畸变校正方法(下简称为RMC方法),可以被看成是分为两个过程:畸变模板校正...
对摄像机参数标定是三维定位的关键。立体视觉系统是工业化生产的关键技术,为了准确定位,摄像机必须标定。标定的方法主要有线性标定与非线性标定。这里提出采用由粗到精,实现精确标定,补偿相机畸变。
动态范围(Dynamic Range)是指摄像机支持的最大输出信号和最小输出信号的比值,或者说图像最亮部分与最暗部分的灰度比值 普通摄像机的动态范围一般在1:1000(60db)左右,而宽动态(Wide Dynamic Range,WDR)摄像机的动态...
需求说明:IPC高清摄像机知识储备来自:http://blog.csdn.net/southcamel/article/details/8305873整理来自:时间的诗一 概念介绍YUV : luma (Y) + chroma (UV) 格式, 一般情况下sensor支持YUV422格式,即数据格式...
摄像机的成像过程主要是主要涉及到几个坐标系的变换(具体过程可以参考相机模型): Created with Raphaël 2.1.2物体世界坐标 摄像机坐标 图像物理坐标 图像像素坐标 从摄像机成像畸变的产生于是其“天生”的,...
上传技术博客真的挺费时间的,不过为了广大的同胞们能节省更多的时间,尽快理解摄像机标定中相关概念及流程,自己付出一点也无所谓,近期通过系统学习书籍《学习opencv》和书籍《机器视觉算法与应用》中有关摄像机...

D9741是一块脉宽调制方三用于也收路像机和笔记本电的等设备上的直流转换器。在便携式的仪器设备上。● 低电压输入时误操作保护电路。...应用:● 电视摄像机 ● 笔记本电脑。主要特点:● 高精度基准电路。
先新建工程,然后建立一个放置采集到的样本图片的文件夹,再建立一个txt格式文件,里面写上图片的路径,如果是相对路径,注意将图片文件和txt都放到工程目录下。 ...程序; // Xiang_Ji_Biao_Ding.cpp: 定义控制台应用...
【Gamma的由来】 首先,要区分照度和亮度,照度是一个客观的量,亮度是一个主观的量,不同的人看相同照度的物体所感受到的亮度是不一样的。对于照度线性变化的物体,人眼感受到的亮度不是线性的。...
(共面行对准:两摄像机图像平面在同一平面上,且同一点投影到两个摄像机图像平面时,应该在两个像素坐标系的同一行),立体校正opencv流程:OpenCV校正步骤:1. stereoRectify()获取所需参数->计算左右相机...

要进行手指旋转校正,可以使用激光笔和摄像机进行跟踪。首先,需要在Matlab的图形窗口中放置一个激光点。然后,对数据进行定标,建立获取的图像像素点与Matlab图形坐标轴之间的对应关系。这样,当激光点在Matlab图形...
1 一些基本的方程推导 1.1 预定义 定义2D点为m=[u,v]Tm=[u,v]^Tm=[u,v]T,3D点为M=[X,Y,Z]TM=[X,Y,Z]^TM=[X,Y,Z]T。用上标~用来表示增广向量(在最后添加元素1,齐次形式): m~=[u,v,1]T \tilde{m}=[u,v,1]^T ...
在手机APP项目开发中,需要调用相机来实现拍照和视频的录制。 但有时候仅仅是知道怎么调用Camera API是不够的,还需要去了解其底层原理。 这篇文章从硬件的角度,来说明相机的成像原理,看完之后也许会豁然开朗 : ...
使用 Matlab Toolbox 进行摄像机标定 DLR CalDe and DLR CalLab 可以自由下载使用(非商业用途) 作者Klaus Strobl,Wolfgang Sepp,Stefan Fuchs,Cristian Paredes 和Klaus Arbter来自机器人与机电学院。...
相机标定详解最近做项目要用到标定,因为是小白,很多东西都不懂,于是查了一堆的博客,但没有一个博客能让我完全能看明白整个过程,绝大多数都讲的不全面,因此自己总结了一篇博客,给自己理一下思路,也能够帮助...
利用小孔成像模型摄像机共面阵列获取图像序列,根据图像序列获取各距离段所对应的桶型失真和像差校正叠加图像,计算基准图像中每个像素的邻域与每一幅校正叠加图像中相应区域的相似测度,并选取相似测度随像差校正...
(Gamma Correction, 伽玛校正): 伽玛校正是对图像的伽玛曲线进行编辑,用于对图像进行非线性色调编辑的方法。它可以检测图像信号中的深色部分和浅色部分,并增加它们之间的比例,从而提高图像的对比度效果。在计算机...
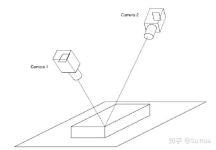
如下图中,红点1与红点2在真实三维世界中表示同一物点,但两个摄像机光心并不处于同一水平线,导致成像时该点纵坐标不相等,极大的增加了双目匹配时的搜索范围。 双目校正原理简述: 通过一个(模型、方程式)获取...
通过CSDN多投影几何校正技术,可以对图像进行投影纠正,消除由于投影机、摄像机或摄影机位置不当、摄影机亮度不均匀等原因引起的图像扭曲和形变。这可以通过计算机视觉算法来实现,如计算投影矩阵,并应用透视变换来...
我们已经了解了相机如何通过在 2D 传感器平面上投射光线来拍摄 3D 场景,生成的图像准确地表示了在...为了恢复场景的 3D 结构和摄像机的 3D 姿态,我们需要对相机参数进行校准,在本节中,我们将介绍如何执行相机标定。
使用camera1调试相机预览+获取每一帧数据, https://www.jianshu.com/p/3440d82545f6 ... 主要学习代码,在这里 MainActivity ...public class MainActivity extends AppCompatActivity implements Hand...
今天介绍图和标定camera。首先是用到的opencv函数。后面附上源码。 FindChessboardCorners 寻找棋盘图的内角点位置 ...int cvFindChessboardCorners( const void*image, CvSize pattern_size, ...
参考:机器视觉学习笔记(6)——双目摄像机标定参数说明 机器视觉学习笔记(8)——基于OpenCV的Bouguet立体校正 双摄像头立体成像(三)-畸变矫正与立体校正人类可以看到3维立体的世界,是因为人的两只眼睛,从...
推荐文章
- Opencontrail CentOS66编译全过程_centos6 ipfix-程序员宅基地
- c语言静态两个数码管显示0-99,按键控制计数,用两个数码管显示0到99。十位数为0的时候,显示为空白...-程序员宅基地
- Android开发:设置背景图片_c#andriod 背景图-程序员宅基地
- 网络通信技术-程序员宅基地
- 简单的学生成绩管理系统(数组实现)_为什么用数组做成绩管理系统他的成绩只显示3和个数组-程序员宅基地
- 基于Python的信用评分卡模型-give me some credit数据集,AUC 0.93 KS 0.71-程序员宅基地
- 基于servlet+jsp 的 java 简单版商城项目_jsp servlet maven商城-程序员宅基地
- 安装php_soap.dll,php如何安装soap扩展-程序员宅基地
- 【MybatisPlus 学习】配置多数据源_mybatisplus同一个方法里操作两个数据源-程序员宅基地
- 用Keil仿真查看PWM输出_keil5如何仿真pwm输出-程序员宅基地