无人机室内编队系统集成简介系统集成关键组件室内定位系统支持外部位置数据导入的开源飞控组网通信地面站基础功能 系统集成关键组件 1 支持引入外部定位数据(室内定位系统提供)的飞行控制器 2 提供精确室内定位...
”无人机室内编队集成“ 的搜索结果
开源飞控px4固件的使用px4外部定位数据协议接口px4提供的引入外部定位信息的Mavlink消息px4外部定位信息启用px4外部航向信息的比重调整 px4外部定位数据协议接口 px4固件对外部定位数据(包括三轴姿态角)的引入提供...
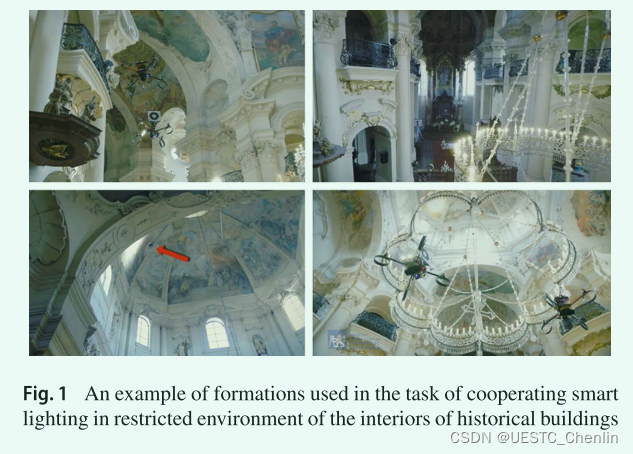
在狭窄空间环境中,多旋翼无人机编队控制面临着极大的挑战。本文提出了一种新的自重构 V 型编队算法,该算法能够使无人机...在实际应用中,无人机编队经常需要在狭窄的空间环境中执行任务,如室内环境、隧道或峡谷等。
在狭窄空间环境中,多旋翼无人机编队控制面临着极大的挑战。本文提出了一种新的自重构 V 型编队算法,该算法能够使无人机...在实际应用中,无人机编队经常需要在狭窄的空间环境中执行任务,如室内环境、隧道或峡谷等。

在狭窄空间环境中,多旋翼无人机编队控制面临着极大的挑战。本文提出了一种新的自重构 V 型编队算法,该算法能够使无人机...在实际应用中,无人机编队经常需要在狭窄的空间环境中执行任务,如室内环境、隧道或峡谷等。
在狭窄空间环境中,多旋翼无人机编队控制面临着极大的挑战。本文提出了一种新的自重构 V 型编队算法,该算法能够使无人机...在实际应用中,无人机编队经常需要在狭窄的空间环境中执行任务,如室内环境、隧道或峡谷等。
它以A、B两国在C区开展无人机战争为背景,该系统的核心功能是通过仿真平台规划无人机航线,并进行验证输出,数据可导入真实无人机,使其按照规定路线精准抵达战场任一位置,支持多人多设备编队联合行动。系统以开源...
在狭窄空间环境中,多旋翼无人机编队控制面临着极大的挑战。本文提出了一种新的自重构 V 型编队算法,该算法能够使无人机...在实际应用中,无人机编队经常需要在狭窄的空间环境中执行任务,如室内环境、隧道或峡谷等。
3D视觉工坊学习交流群这篇教程来详细介绍一下如何编写出一个控制无人机的ROS程序包编写ROS程序包推荐roboware-studio,这款软件是在开源的vscode基础上二次开发,用于ROS程序包的开发,非常好用roboware-studio的...

室内定位技术在现代社会中有着广泛的应用,例如导航、资产跟踪和人员定位。超声波室内定位技术是一种利用超声波信号进行室内定位的方法,具有精度高、鲁棒性好等优点。本文将介绍一种基于高斯ASK调制超声室内定位...

Prometheus,在希腊神话中,是最具...- 如何在电脑中进行无人机室内/室外的可视化仿真测试或实验飞行? - 如何利用无人机平台完成论文中仿真与实验部分? - 如何利用无人机平台完成开发项目中的实物验证工作? - ...
Kerloud UAV系列作为云讷科技(深圳)面向无人机系统集成爱好者的高性价比开发平台,支持PX4、Dronecode、ROS、Nvidia和Ubuntu等高级软件社区。 产品特点 模块化设计,可加载树莓派、Jetson Nano电脑 机身紧凑,...
只说民用航空器整机制造,技术最接近的行业是军工,然后是无人机,还有汽车、农业机械等。“互联网+”曾经掀起互联网造车热潮,现在开始卷到航空业去也不足为奇;比如,作者我。比起入侵汽车行业,互联网人入侵航空...
无人机集群技术有着广泛的潜力应用,如搜索和救援、环境监测、农业、建筑、物流等。...为实现室内环境无人机集群算法的验证以及更复杂的任务和应用,我们推出了这套无人机集群套件——Crazyswarm。
提到无人机,有人也许会想到巡航在海上的大型的军用武器,而近年来,随着消费级无人机的技术革新和价格优势,这类无人机开始被大众所熟悉。无论是摄影还是送货,只要一提起无人机,人们马上会联想到大疆(DJI)、...
然而,在之后的几年中,因优良的操控性能,多旋翼迅速成为航拍和航模运动领域的新星,但这仍然需要专业人员调试或装配飞机。2012年底,中国大疆公司推出四旋翼一体机——小精灵Phantom。 因该产品极大地降低...
工程12(2022)24研究无人驾驶智能无人机-综述UnIC:走向无人智能集群及其融入社会张福彪a,于晶b,林德福a,张军ca北京理工大学航空航天工程学院,北京100081b北京理工大学经济管理学院,北京100081c北京理工大学...
然而,在之后的几年中,因优良的操控性能,多旋翼迅速成为航拍和航模运动领域的新星,但这仍然需要专业人员调试或装配飞机。 对于目前多旋翼产品,一般分半自主控制方式和全自主控制方式。半自主控
为何偏爱多旋翼? 常见飞行器通常被分为固定翼、直升机和多旋翼(四旋翼最为主流)。在2010年之前,固定翼和直升机无论在航拍还是航模运动领域,基本上占有绝对主流的地位。2012年底,中国大疆公司推出四旋翼一体机...
乾天驭爪——智能空中作业机器人1.2 研究意义1.2.1景区垃圾清理1.2.2核废料处理1.2.3抢险救援1.3 方案设计及创新点第二章 电路与通信部分实现2.1 无人机主控制电路部分2.1.1 大疆妙算2.1.2 云台电路2.1.3 无人机图传...
一 多旋翼发展史 沉寂期:1990年以前 早在1907年的法国,在C.Richet教授的指导下,Breguet兄弟进行了他们的旋翼式直升机的飞行试验,这是记录的最早构型。因为设计不切实际,只飞了1.5m,随后落下 ...

新服务让开发人员能够快速、轻松地构建智能机器人应用。AWS客户NASA喷气推进实验室(JPL)、Stanley Black&Decker、Robot Care Syste...
推荐文章
- C++零碎知识点(一)-程序员宅基地
- 【Python学习笔记】Coursera课程《Python Data Structures》 密歇根大学 Charles Severance——Week5 Dictionary课堂笔记...-程序员宅基地
- v-html 解析字符串到 html 换行显示_html字符串 v-html-程序员宅基地
- 招收跨专业考计算机的学校,跨专业考研,接受跨专业考研的学校。-程序员宅基地
- 数学模型预测模型_改进著名的nfl预测模型-程序员宅基地
- ELK-FileBeat入门_filebeat 6.5.4 - windows-程序员宅基地
- 微信小程序架构图与开发_微信小程序框架图-程序员宅基地
- Node.js 下载与安装教程_node下载-程序员宅基地
- MySQL报错:The server time zone value '�й���ʱ��' is unrecognized or represents more than one time zone_连接失败! the server time zone value ' й ' is-程序员宅基地
- 数学与生活——读书笔记-程序员宅基地