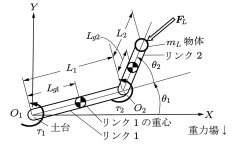
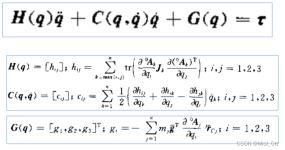
通过两个例子,尽可能描述清楚拉格朗日动力学方程。
”机器人动力学“ 的搜索结果

资源名称:机器人动力学与控制内容简介: 本书适用于“控制理论与控制工程”专业及“机械电子工程”、“机械制造及其自动化”等专业机器人控制研究方向的硕士研究生使用,也可作为从事有关研究的博士生和工程技术...
机器人动力学常见的建模方法
/20210416/3c24a29a4da26b1118cd781fe93c7706.zip

Thanks Mark W. Spong for his great of Robot Modeling and Control.欧拉-拉格朗日方程 Euler-Lagrange Equation根据牛顿运动定律,我们来推导欧拉-拉格朗日方程。我们假设质点的运动方程是: ...
机器人动力学研究最基础的是建立完整的动力学方程,这其中最关键的是建立多连杆机构的动力学方程。笔者以经典的PUMA560机器人构型为例,阐述四种不同的机器人动力学形式及函数文件。计算环境为matlab,方便研究者的...
机器人动力学与控制-本文详细讲述了关于机器人运动学、动力学及控制的基本问题和基础理论
机器人动力学方程(一):牛顿-欧拉法
为研究机器人的关节动力驱动,通过 MATLAB建立机器人Simulink 主程序,并写入控制器子程序,在仿真环境中调整相应参数,得到机器人的动力学仿真参数,对机器人的正逆动力学进行分析,直观的显示了每个关节的驱动力矩...
这个代码是机器人动力学方程的matlab代码实现,使用拉格朗日方法。 此代码是根据霍伟编著的《机器人动力学与控制》一书中的公式改写的。 参考网址:https://www.jianshu.com/p/6d04539f1cfe 参考网址中提供的代码...
教材的重点在于用严谨而系统的方式介绍机器人动力学与控制的基本概念和主要结果。全面介绍了机器人建模与控制研究中所涉及的基本概念、算法和有代表性的结果,特别是控制方法的介绍更具全面性。全书共3章,分别是:...
欠驱动五连杆双足机器人的动态模型该项目包含两个 MATLAB 函数,用于获取欠驱动五连杆双足机器人的动力学模型。 第一个文件 (Generlazed.m) 用于生成作为绝对角度函数的动态模型,绝对角度是两足动物的每个链接与...
三自由度机器人动力学(三个转动自由度+word报告+matlab代码)
#资源达人分享计划#
高等教育出版社出版的霍伟主编《机器人动力学与控制》,适合机器人控制方向的研究、学习。
机器人运动学,机器人动力学;拉格朗日动力学;倒立摆。
机器人动力学建模和识别的符号框架 使用和库。 引文: 例子 2自由度示例机器人的定义: >> > import sympy >> > import sympybotics >> > rbtdef = sympybotics . RobotDef ( 'Example Robot' , # robot name ... ...
#资源达人分享计划#
机器人动力学参数辨识
标签: 机器人
机器人动力学参数辨识
描述了机器人的结构与行走原理,分析了机器人在大动脉流场环境中的受力,利用空间算子代数方法,建立了机器人动力学模型,通过试验验证了机器人行走原理,在此基础上进一步进行了任务仿真,测试了机器人在不同环境中的动力...
研究一种3-RRRT新型高速搬运机器人动力学建模及正向动力学求解方法。以多体系统理论和Kane方法建立了该并联机器人的运动学与动力学模型,运用违约修正约束稳定法对动力学模型进行求解。并利用Matlab软件平台进行了...
机器人动力学与控制——霍伟
标签: 机器人 动力学
教材的重点在于用严谨而系统的方式介绍机器人动力学与控制的基本概念和主要结果。全面介绍了机器人建模与控制研究中所涉及的基本概念、算法和有代表性的结果,特别是控制方法的介绍更具全面性。全书共3章,分别是:...
弹跳机器人可以跃过数倍于自身尺寸的障碍物或沟渠,对地形有较强的适应力。但是相对于已经实用化的其他类型机器人,弹跳机器人目前还处于研究阶段。...本文的分析结果同时适用于连续型和间隙型弹跳机器人的动力学分析。
设计一种履带式永磁真空混合吸附的船舶壁面除锈爬壁机器人,该机器人具有负载大、本体重特点,且机器人负载质量以及重心位置随爬壁高度...仿真和试验结果表明,机器人动力学优化模型可靠,运动性能受永磁吸附力、真空
基于图像的非标定视觉伺服机器人动力学模型新方法。
细节增强的matlab代码BIRDy:识别机器人动力学的基准 如果没有合适的框架,对于学生,工程师或研究人员而言,很难评估给定场景下参数识别方法的相关性。 我们在这里提出一个专门用于机器人识别的统一基准。 到目前...
推荐文章
- Response使用 application/octet-stream 响应到前端_application/octet-stream;charset=utf-8-程序员宅基地
- 利用MultipartFile实现文件上传_实现了multipartfile file上传文件时要选择一个栏目,传给后端一个栏目id,如何实现-程序员宅基地
- muduo之Singleton_muduo singleton-程序员宅基地
- html5 动态存储 localStorage.name 和localStorage.setItem()的差别_localstorage.setitem('aa')和localstorage.aa一样吗-程序员宅基地
- 02.loadrunner之http接口脚本编写_http脚本-程序员宅基地
- The server time zone value ‘�й���ʱ��‘ is unrecognized or represents more than one time zone.-程序员宅基地
- 如何打造企业短视频账号的人设?_做的比较有人格化的公司短视频账号-程序员宅基地
- 一个会做饭的程序员如何每天给女朋友带不同的便当?-程序员宅基地
- PendingIntent重定向:一种针对安卓系统和流行App的通用提权方法——BlackHat EU 2021议题详解 (下)_getrunningservicecontrolpanel-程序员宅基地
- python 之 面向对象(反射、__str__、__del__)-程序员宅基地