机器人动力学拉格朗日方程PPT学习教案.pptx
”机器人动力学“ 的搜索结果
第4章机器人动力学PPT学习教案.pptx
基于李群方法的工业机器人动力学分析,刘博宇,盖玉先,为了降低机器人动力学模型的计算复杂性,基于李群方法,研究了具有6个自由度工业机器人的动力学问题。通过指数映射,对机器人连�
第4章 机器人动力学
标签: 机器人学 蔡自兴
机器人学 第三版 蔡自兴 授课PPT,介绍机器人学的基本原理及其应用,全书共12章,系统而全面的介绍机器人学方面的知识。
机器人机构分析与综合课件:3_2_2 机器人动力学.ppt

#资源达人分享计划#
自平衡立方体机器人动力学建模.pdf
在本研究中,提出并实现了耦合计算流体动力学(CFD)模型,以促进仿生起伏机器人的流体动力学效果的数值模拟。 在三个典型的期望运动模式(行进,偏航和偏航偏航)下,通过计算和实验研究了由两个仿生起伏鳍推动的...
#资源达人分享计划#
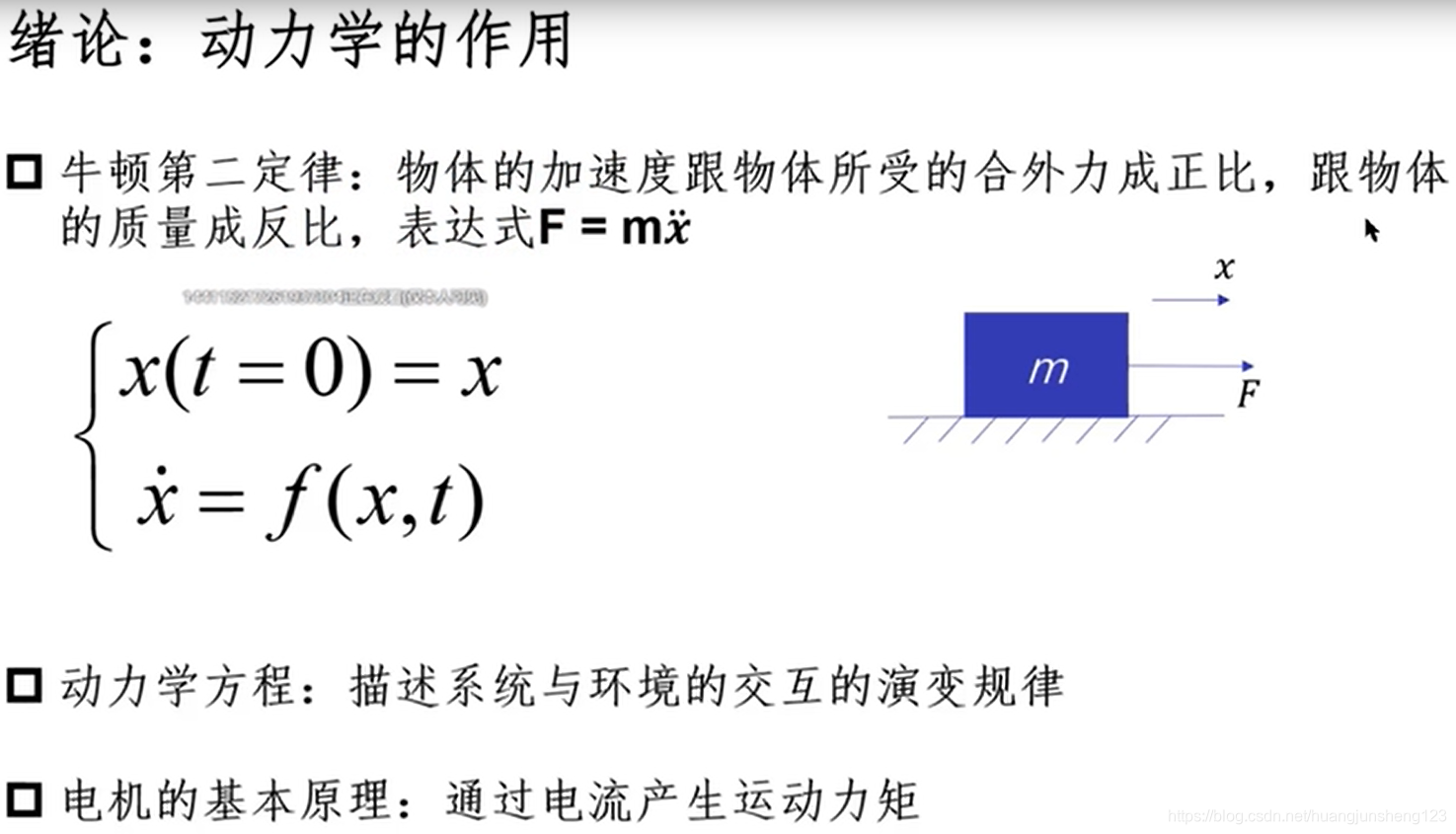
前言 为什么要考虑运动学?...动力学 隐式表达: gi(q¨,q˙,q)=0 \displaystyle g_i({\ddot q},{\dot q},q) = 0 gi(q¨,q˙,q)=0 动力学 显示表达: q¨=f(q˙,q,u) \displaystyle {\ddot q}= f({\dot
#资源达人分享计划#

首先用李群李代数描述了机器人的反向动力学,然后将牛顿一欧拉方法和铰接体惯量方法结合起来,给出了含主被动关节的机器人动力学解决方法。利用动力学方法得到的结果,采用计算力矩控制方法进行仿真,并与PID控制...
第八讲-机器人动力学--牛顿-欧拉方程.ppt
多运动模式机器人动力学建模及仿真
标签: 研究论文
多运动模式机器人动力学建模及仿真
1.版本:matlab2014/2019a/2021a,内含运行结果,不会运行可私信 2.附赠案例数据可直接运行matlab程序。 3.代码特点:参数化编程、参数可方便更改、代码编程思路清晰、注释明细。 4.适用对象:计算机,电子...
#资源达人分享计划#
机器人动力学牛顿欧拉方程PPT学习教案.pptx
机器人动力学拉格朗日方程图文PPT学习教案.pptx
一个nn连杆的机器人的动力学方程含有很多项,...但是,机器人动力学方程含有一些有助于开发控制算法的重要性质,其中最重要的是反对称性、无源性、有界性和参数的线性性。反对称性(skew aymmetry)和无源性(passivity)
#资源达人分享计划#
在Pro/E中完成了焊接机器人的三维建模,然后导入ADAMS...考虑到柔性构件对机器人系统运动性能的影响,构建了该机器人的刚柔耦合模型,并进行了动力学仿真。结果表明:柔性手臂构件对机械手的运动精度产生了较大影响。
5、机器人动力学PPT课件.pptx
6R机器人动力学仿真在MATLAB环境下的实现.pdf
为了更好的把9.1节所推导的欧拉-拉格朗日方程应用在机器人上,我们可以在满足下面两个条件的情况下把欧拉-拉格朗日方程特殊化: 条件1.动能可以表示为以下二次方程的形式 nxn的惯性矩阵D(q)是对称的正定矩阵 ...
#资源达人分享计划#
基于Solidworks与Matlab的码垛机器人动力学仿真.pdf
机器人技术视频讲座(64讲)-机器人技术20-机器人刚体动力学zip,机器人技术视频讲座(64讲)-机器人技术20-机器人刚体动力学
推荐文章
- 机器学习之超参数优化 - 网格优化方法(随机网格搜索)_网格搜索参数优化-程序员宅基地
- Lumina网络进入SDN市场-程序员宅基地
- python引用传递的区别_php传值引用的区别-程序员宅基地
- 《TCP/IP详解 卷2》 笔记: 简介_tcpip详解卷二有必要看吗-程序员宅基地
- 饺子播放器Jzvd使用过程中遇到的问题汇总-程序员宅基地
- python- flask current_app详解,与 current_app._get_current_object()的区别以及异步发送邮件实例-程序员宅基地
- 堪比ps的mac修图软件 Pixelmator Pro 2.0.6中文版 支持Silicon M1_pixelmator堆栈-程序员宅基地
- 「USACO2015」 最大流 - 树上差分_usaco 差分-程序员宅基地
- Leetcode #315: 计算右侧小于当前元素的个数_找元素右边比他小的数字-程序员宅基地
- HTTP图解读书笔记(第六章 HTTP首部)响应首部字段_web响应的首部内容-程序员宅基地