
”机器人概率定位“ 的搜索结果
而且居然是07年的文章了,这十年,看国内的发展好像并不是十分大作者:陈卫东,张 飞摘要:自主移动机器人在未知环境下作业时,首先要解决的基本问题就是其自身的定位问题,而定位问题与环境地图的创建又是相辅相成...
未来,智能机器人很有可能成为继PC和智能手机之后的新一代杀手锏级别产品,极大的为我们的生活提供便利,但机器人产品的理想落地,需要行业各个技术环节的一起努力,自主定位导航作为机器人自主行走最为核心的技术之...

amcl是移动机器人二维环境下的概率定位系统,根据订阅到的地图数据配合激光扫描特征,使用粒子滤波获取最佳定位点 move_base包可以用来达到一个给定的导航目标点。当选择机器人行走的路径时,move_base包合并base_...
之前的文章介绍过卡尔曼滤波算法进行定位,我们知道kalman算法适合用于线性的高斯分布的状态环境中,我们也介绍了EKF,来解决在非高斯和非线性环境下的机器人定位算法。但是他们在现实应用中存在计算量,内存消耗上...
可以把定位看作坐标系变换问题,即全局地图坐标系与机器人local坐标系的变换。 传感器通常不能直接测量位置,需要从其他数据中推算位置。 通常需要累积一段时间的数据,来进行定位。 定位算法通常针对特定地图表达...

IRON:鲁棒性NDT地图匹配的Fast兴趣特征点描述子及其在机器人定位中的应用 IRON:A Fast Interest Point Descriptor for Robust NDT-Map Matching and its Application to Robot Localization 1、本文主要贡献 ...
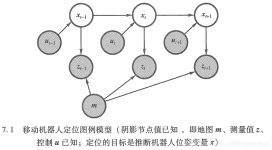
在移动机器人同时定位与地图创建(SLAM)过程中,机器人本身位置不确定,其所处环境也不可预知,针对这些不确定性因素,应用贝叶斯规则作为理论基础,建立移动机器人SLAM算法的概率表示模型,通过扩展卡尔曼滤波器实现...
可在www.sciencedirect.com上在线ScienceDirect电气系统与信息技术学报1(2014)58基于单片机的移动机器人定位与避障阿兹莎ZakiJiang, Osama Arafa,Sanaa I.Amer电力电子和能源转换部,电子研究所,El-Tahrir ...
针对国内外近年来关于移动机器人同时定位与地图创建的研究工作进行了总结和分析,重点介绍了机器人的地图创建方法类别、基于概率理论的自主定位方法、同时定位与地图创建的问题描述及研究方法等方面的发展现状及存在...
研究用压缩的全向图像在移动机器人上定位和环境建模Z采用Parzen 窗方法估计全景图像边缘的概率密 度, 用FFT 方法简化计算获得密度估计的实时处理效果Z 研究了全景图像的旋转不变特性和全景图像矢量集合的 主成分提取...
matlab信任模型代码Neato SLAM(纽卡斯尔大学MCHA4000模块,G6) ...这通常是在使用概率方法(例如贝叶斯过滤器)的帮助下完成的,该方法用于在已知更多信息时更新机器人位置(状态)的概率。 Neato机
粒子滤波与机器人定位技术
标签: 机器人
在机器人定位技术中,粒子滤波被广泛应用于解决感知和定位的不确定性问题,如多目标跟踪、地图定位等。本文将从背景、核心概念、算法原理、代码实例、未来发展趋势等多个方面进行全面介绍。 1.1 背景 在现实生活中...
机器人定位与导航是机器人技术中的基础和关键环节,它有助于机器人在未知环境中自主地行动和完成任务。在现实生活中,我们可以看到许多应用场景,如自动驾驶汽车、无人航空器、商业巡检机器人、家庭家居机器人等。在...
可在www.sciencedirect.com上在线ScienceDirect电气系统与信息技术学报1(2014)58基于单片机的移动机器人定位与避障阿兹莎ZakiJiang, Osama Arafa,Sanaa I.Amer电力电子和能源转换部,电子研究所,El-Tahrir ...
声明:本博客转载自 东方赤龙 ,谢谢博主的分享!!!(转载仅供个人学习) 卡尔曼滤波(Kalman filtering)最早在阿波罗飞船的导航电脑中使用,它对阿波罗计划的轨道预测很有用。 卡尔曼滤波是一种利用线性系统...
研二下学期开始做基于高精度三维激光点云地图的定位工作,由于导师不懂瞎指挥,全靠自己摸索,走了好多弯路。其实我的工作目标很明确,地图是已经建好的地图,我只是在里面做定位就行了。然而一开始我想把整个slam...
物联网和网络物理系统2(2022)63计算机视觉在移动机器人定位中的应用Antonio Savio Silva Oliveirab,Marcello Carvalho dos Reisa,*,Francisco Alan Xavier da Motac,Maria Elisa Marciano Martinezd,Auzuir ...
定位是机器人研究中的重要技术,是完成自主运行的前提条件,要达到预期的目标就要确定机器人的位置。环境中存在诸多不确定因素,例如行走的人、运动的物体等,怎么才能够让机器人在这些情况下确定自己的位置进行导航...
作者|晓畅Auto 编辑|汽车人原文链接:https://zhuanlan.zhihu.com/p/369415752点击下方卡片,关注“自动驾驶之心”...联系删文在上一篇RoboCup中的机器人自定位(一)中https://zhuanlan.zhihu.com/p/369413220我们...
Bidya Nagar,Mahura,Janla,Bhubaneswar,Odisha 752054,印度阿提奇莱因福奥文章历史记录:收到2020年2021年1月18日修订2021年2月27日接受2021年3月11日网上发售保留字:移动机器人定位的概率方法满贯循序渐进的...
张宏 :移动机器人全局定位技术与方法是啥?道翰天琼认知智能机器人平台API接口大脑为您揭秘。 人工智能不仅要复现人类的大脑,还要构建容纳智能大脑的身体,机器人将是人工智能的完全体。8月7日-8月9日,2020...
在讨论这类机器人是否能解决实际问题时,自主定位导航技术作为机器人智能化的第一步正不断引起行业内的重视。同时,作为自主定位导航技术的重要突破口,SLAM技术也成为关注焦点。 正如图中所示,机器人自主...

SLAM(Simultaneous Localization and Mapping)即同时定位与地图构建技术,是指机器人在未知环境中实现自主定位和地图构建的算法与方法。它是无人系统和自主导航领域中的关键技术之一,通过将传感器数据与运动信息...

推荐文章
- python入门(13)异常与文件_except filenotfounderror:-程序员宅基地
- Android面试攻略_详细了解在当今的社会里android工程师应具备什么的技能?并能详细说说自己的见解。-程序员宅基地
- Zendframework 1.6整合Smarty_setting private or protected class member is not a-程序员宅基地
- Qt-装饰者模式_qt装饰模式-程序员宅基地
- 新开普掌上校园服务管理平台service.action RCE漏洞复现 [附POC]-程序员宅基地
- 基于 Milvus 的音频检索系统-程序员宅基地
- 331、基于51单片机智能红外遥控暖风机温度无线蓝牙远程控制系统设计(程序+原理图+配套资料等)_红外感应暖风机自动控制系统设计-程序员宅基地
- Android自定义圆角矩形图片ImageView_android 矩形圆角imageview-程序员宅基地
- 又见回文 字符串-程序员宅基地
- switch的参数可以是什么类型?_switch的参数有哪些-程序员宅基地