
”机器人概率定位“ 的搜索结果
概率机器人中关于机器人定位方面的介绍,主要内容用贝叶斯滤波、卡尔曼滤波等。 相关下载链接://download.csdn.net/download/muyilove/10502673?utm_source=bbsseo

机器人学——机器人导航
标签: roboto
SLAM(Simultaneous Localization and Mapping)即同时定位与地图构建,是机器人领域中的重要技术之一。在这一章节中,我们将深入探讨SLAM算法的基本原理和实现方式,包括基于视觉和激光雷达的SLAM算法,以及在S
这一章主要讲如何通过先验概率+观察结果+移动后的观察结果,给机器人定位。 从上到下四根线,所有的前提都是门的位置已知。 没有任何条件下的车的位置的均匀概率分布 已知车感应到在一扇门旁边,此时车的位置的...
智能手术机器人技术与原理(二)
标签: 机器人
外骨骼机器人是模仿生物界外骨骼而提出的新型机电一体化装置,具有支撑、运动、防护功能。它结合机械结构、控制、驱动方式、人机交互等关键技术,使穿戴者能完成自身无法完成的任务。
基于SLAM的机器人


概率机器人致力于研究机器人感知和行为的不确定性。概率机器人的主要思想就是用概率理论的运算去明确地表示这种不确定性。换句话说,不再依赖可能出现的情况单一的“最好推测”,而是用概率算法来表示在整个推测空间...

由于四足机器人是高度冗余的系统,结构的复杂性给控制带来较大的难度,基于无模型的VMC控制,类似于笛卡尔空间的PD控制,不涉及四足机器人的运动学和动力学逆解,只需要计算雅可比矩阵,便可通过力雅可比矩阵将工作...
作者:小虎哥哥爱学习 ...来源:知乎 著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。...2.ROS移动机器人的整体构造 2.1.硬件构造解析 2.2.电机解析 2.3.电机驱动板解析 2.4.底.
《概率机器人》 第一章 绪论 1.1机器人...
概率路线图(PRM)规划 Voronoi路线图规划 快速探索随机树(RRT) 基本RRT RRT公司* 带dubins路径的RRT RRT*带dubins路径 RRT*带芦苇羊径 闭环RRT* 三次样条规划 B样条规划 贝塞尔路径规划 五次多项式...
至此已完成整个移动机器人导航仿真的工作,完整代码见:http://pan.baidu.com/s/1geEWmv5amclamcl是移动机器人在2D环境中的概率定位系统。它实现了自适应(或KLD采样)蒙特卡罗定位方法,其使用粒子滤波器来针对已知...
机器人定位问题 General schematic for mobile robot localization 以下面的两幅图a、b为例,对移动机器人定位问题进行说明。假如机器人从一个已知的位置开始运动,利用里程计(编码器)可以对其运动进行跟踪...
原标题:焊接机器人常见故障原因及解决措施通常很多企业或者学校采购焊接机器人后,普遍认为所有的活儿都可以干,不知机器人使用好友多想前提,且也是与焊接质量的好坏是息息相关的,从刚开始对机器人的依赖性比较大...
作者:禅与计算机程序设计艺术 一、简介 目前,人类在收集和处理图像数据方面已经取得了非常大的进步。随着技术的不断迭代升级,机器视觉...由于机器人本身是个动态多变的物体,因此它的视觉输入也会随着环境的变化而
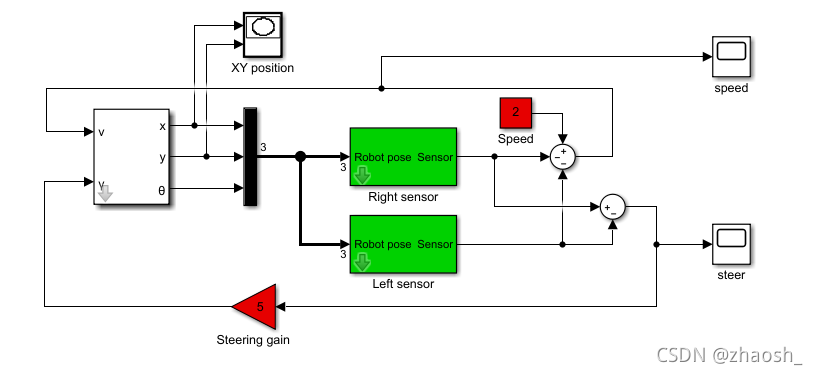
来自距离传感器数据的占用网格图使用 PRM 的环境中的路径规划用纯追踪控制器控制机器人使用矢量场直方图 + (VFH +) 避障使用蒙特卡罗定位 (MCL) 定位机器人使用粒子过滤器跟踪类似汽车的机器人使用图像识别技术的...
▍定位问题的引入 我们所熟知的机器人,可以大致分为以下四类: 这四种类型的机器人可以做组合,如有智能行为的移动机器人,机器人可以移动并做一些操作行为。 前两类机器人发展的比较
本章介绍两个全局定位算法,与第七章介绍的高斯方法有所不同: 可以处理原始传感器数据,不用提取特征,也可以处理负信息。 非参数化,不受限于EKF的单模型分布。 可以解决全局定位问题,有时甚至可以解决绑架问题...
无人驾驶之《概率机器人》学习指南 懂了它你才能懂ROS的SLAM框架 因为概率机器人这本书确实太多了,本人刚培训完这本书,深感很多概念你可能自动懂了,也觉得自己已经讲得让幼儿园都能听懂了,还是很多人听不懂,...
然而,使用这些模型开发映射和定位方法非常具有挑战性,尤其是当机器人必须处理长期映射、定位、导航、遮挡和动态环境时。换句话说,移动机器人必须处理环境外观变化,这会修改其对环境的表示。本文提出了一种基于...
随着人工智能的发展,越来越多的人开始关注和研究聊天机器人的发展。聊天机器人的目标就是让人们更方便、更容易地沟通和交流。他们可以自动理解用户的输入信息,并按照相应的逻辑进行回应。与此同时,它们还要具备...

二、移动机器人(全局)定位 是在给定地图的基础上 边走 边定位。 一般用的是amcl方法, 三、需要的模块: 1. 机器人轮子的运动模型 motion model 可以由里程计(左右电机编码器采集获得数据) 2. 机器人上...
该课程为谷歌无人车之父塞巴斯蒂安·特龙于2012年4月在Udacity网站发布,讲授人工智能的基本方法,包括概率推论、规划和搜索、定位、跟踪和控制,所有内容都是以自动驾驶机车技术为重点。该课程需要初步的Python基础...
推荐文章
- C++语法基础--标准库类型--bitset-程序员宅基地
- [C++] 第三方线程池库BS::thread_pool介绍和使用-程序员宅基地
- 如何使用openssl dgst生成哈希、签名、验签-程序员宅基地
- ios---剪裁圆形图片方法_ios软件圆形剪裁-程序员宅基地
- No module named 'matplotlib.finance'及name 'candlestick_ochl' is not defined强力解决办法-程序员宅基地
- 基于java快递代取计算机毕业设计源码+系统+lw文档+mysql数据库+调试部署_快递企业涉及到的计算机语言-程序员宅基地
- RedisTemplate与zset redis_redistemplate zset-程序员宅基地
- 服务器虚拟化培训计划,vmware虚拟机使用培训(一)概要.ppt-程序员宅基地
- application/x-www-form-urlencoded方式对post请求传参-程序员宅基地
- 网络安全常见十大漏洞总结(原理、危害、防御)-程序员宅基地