
”机器人运动学“ 的搜索结果
机器人学:(3)机器人运动学
标签: 机器人
机器人运动学(Kinematics)是从几何角度描述和研究机器人的位置、速度和加速度随时间的变化规律的科学,它不涉及机器人本体的物理性质和加在其上的力。这里主要介绍机器人运动学的建模方法及逆运动学的求解方法。
常见移动机器人运动学模型总结,关注“混沌无形”公号,获取免费资源
【机器人学】机器人运动学基础
标签: 机器人

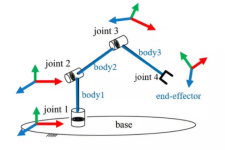
以某工业串联机器人为研究对象,利用D-H方法创建机器人各个连杆坐标系并确定D-H(结构)参数,用正交变换矩阵顺次相乘完成运动学正解的推导,通过矩阵左乘使对应元素相等求解运动学逆解方程。利用Matla b软件Robotics ...
MATLAB运动学逆解
#资源达人分享计划#
#资源达人分享计划#
履带式机器人运动学分析.pdf
三轴delta并联机器人运动学算法,并联机器人正向逆向求解小工具 Visual StudioC#代码工程文件,欢迎大家下载参考学习。有什么问题请给我发邮箱[email protected]
基于MATLAB Robotics的SCARA机器人运动学分析及轨迹规划.pdf
puma560机器人运动学分析与轨迹规划(程序+报告)
#资源达人分享计划#
机器人轨迹规划,运动学代码,matlab建模仿真。
六自由度机器人运动学正反解求解过程,十分详细,机器人运动学
基于MATLAB和RobotStudio的6-DOF机器人运动学分析与仿真.pdf
分拣机器人设计及机器人运动学仿真报告
#资源达人分享计划#
根据机器人D-H矩阵理论,通过VS50机器人工件中心坐标系向机座坐标系的齐次坐标变换,建立了该机器人运动学正问题的数学模型。求解该方程并测量该模型在运动仿真前后其工件中心的位置,使VS50机器人的数学模型和运动仿真...
基于MATLAB的机器人运动学仿真与轨迹规划.pdf
#资源达人分享计划#
基于Matlab_Adams的工业焊接机器人运动学分析与控制联合仿真.pdf
机器人运动学.ppt
机器人运动学坐标变换
论述了3自由度平面并联机器人的6种基本结构类型:RRR、PRR、RPR-Ⅰ、RPR-Ⅱ、RRP和PRP,以及其运动学求解的共性和个性问题。以RPR-Ⅱ型并联机器人为例采用MATLAB 6.1完成了其轨迹规划器的设计,实现了系统中任何构件...
为了更好地控制焊接机器人进行精准的焊接作业,以ABBIRB1600型焊接机器人为研究对象,利用MATLAB分析了它的正运动学、逆运动学和轨迹规划问题。基于标准D-H法对其进行建模,建立正运动学方程;在正向运动学的基础上,通过...
机器人运动学的分析是研究机器人控制的基础,能够保证机器人的控制化程度。以库卡机器人为例,建立D-H坐标系,对它进行运动学正反解,用MATLAB辅助计算。
工业机器人运动学参数标定方法仿真.pdf
#资源达人分享计划#
推荐文章
- 利用playbook安装和卸载nginx_playbook 卸载nginx-程序员宅基地
- Leetcode--有效的括号-程序员宅基地
- 使用expdp工具导出数据库下的scott用户的相关信息,不导出表数据,只想导出相关的元数据(表和索引相关定义)-程序员宅基地
- 生成矩阵_生成经济距离空间权重矩阵的Stata代码-程序员宅基地
- oracle中如何创建/删除数据库的实例_oracle9i如何删除和创建实例-程序员宅基地
- java计算机毕业设计高校人事管理系统MyBatis+系统+LW文档+源码+调试部署-程序员宅基地
- Linux下实现蜜罐系统_硬件:局域网内联网的两台主机,其中一台linux操作系统主机安装“蜜罐”。另一台为w-程序员宅基地
- 洛谷 1073 最优贸易 NOIP2009T3 SPFA-程序员宅基地
- 【Centos 7】【Docker】 安装 kafka_centos kafka docker-程序员宅基地
- VulnHub-DRIFTINGBLUES: 3_nmap -sp ip/mask-程序员宅基地