零基础如何入门激光SLAM
标签: slam入门
最近有几个人加我,都说是刚开始学激光slam,基本都是研一,情况也都差不多,有的是课题组里只有自己做slam,有的是完全没人带,自己也没有基础. 仔细想一想,其实入门slam真是个不容易的事. 首先,编程语言,...
标签: slam入门
最近有几个人加我,都说是刚开始学激光slam,基本都是研一,情况也都差不多,有的是课题组里只有自己做slam,有的是完全没人带,自己也没有基础. 仔细想一想,其实入门slam真是个不容易的事. 首先,编程语言,...
标签: 激光 SLAM 算法
激光 SLAM 算法 源码,开源代码,激光 SLAM 算法 源码,开源代码,
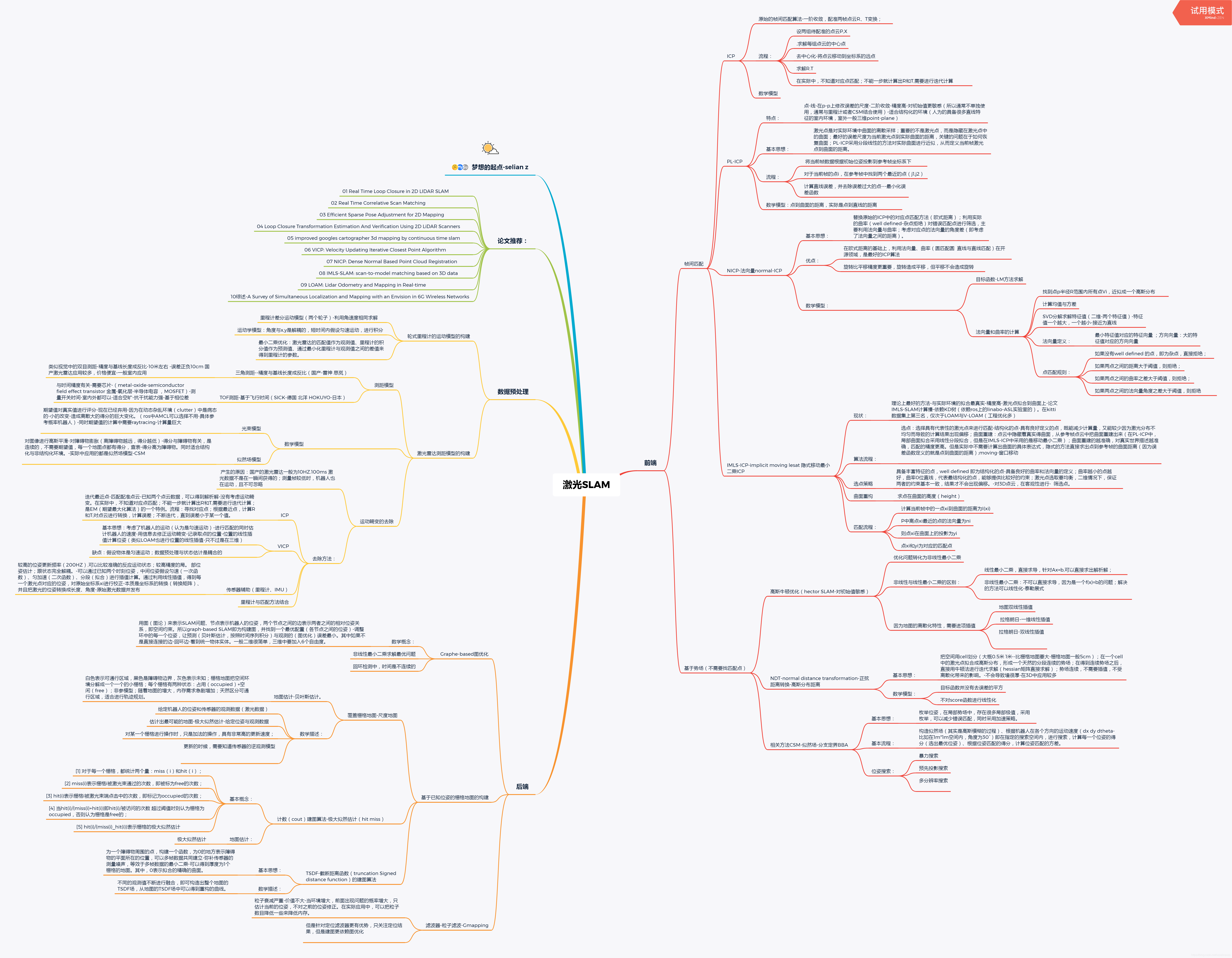
激光slam简介与常用框架
作者|Sky Shaw 编辑|一点人工一点智能原文链接:https://zhuanlan.zhihu.com/p/501102444点击下方卡片,关注“自动...获取视觉SLAM、激光SLAM、RGBD-SLAM等多篇综述!01 引言:SLAM概念与结构1.1 SLAM概述首先,本...
SLAM的全称是Simultaneous Localization and Mapping即时定位与地图构建,为解决机器人自主导航的问题。人在一个未知的环境下也不知如何行进,我们闭着眼睛也不知道怎么走路,机器人如人一样,也需要一个“眼睛”与...
激光SLAM理论与实践第2章

点云是一个数据集,数据集中的每个点代表一组X、Y、Z几何坐标和一个强度值,这个强度值根据物体表面反射率记录返回信号的强度。当这些点组合在一起时,就会形成一个点云,即空间中代表3D形状或对象的数据点集合。...
A Flexible and Scalable SLAM System with FullStefan Kohlbrecher and Oskar von St
标签: 文档资料
激光SLAM理论与实践 课程作业和资料
开源激光SLAM优质论文,包括carto,lio,loam,lego-loam,lio-sam,gmapping,hector-slam
occupany_mapping.tar.gz
在 MATLAB 和 Gazebo 中进行激光 SLAM(Simultaneous Localization and Mapping)仿真是可行的,但需要一些步骤和工具。下面是一般的步骤和所需工具的简要介绍: 步骤: 构建仿真环境: 使用 Gazebo 创建一个仿真...
标签: slam
激光SLAM入门学习笔记(持续更新)激光SLAM入门学习笔记(持续更新)一、推荐阅读书籍二、推荐公众号、知乎、博客1、公众号2、知乎3、博客三、推荐阅读论文&代码(参考泡泡机器人)2D激光SLAM3D激光SLAM1、LOAM...
数据关联是激光SLAM匹配算法中的关键环节。数据关联的目标是找到当前激光扫描中的特征点与先前扫描或地图中的特征点之间的对应关系。数据关联的目的是找到当前扫描中的特征点与先前扫描或地图中的特征点之间的对应...
毕业设计基于ROS激光SLAM与Kinect摄像头的协作机器人源码.zip毕业设计基于ROS激光SLAM与Kinect摄像头的协作机器人源码.zip毕业设计基于ROS激光SLAM与Kinect摄像头的协作机器人源码.zip毕业设计基于ROS激光SLAM与...
TransformStudy.tar.gz
A-LOAM是香港科技大学、华为天才少年秦通博士对张绩的LOAM框架进行强化的一个激光SLAM框架。作为学习激光SLAM的入门框架,A-LOAM的代码可读性和框架思路都值得激光SLAM初学者仔细研读。这个框架使⽤Eigen以及Ceres-...
基于ROS激光SLAM与Kinect摄像头的协作机器人设计python源码.zip基于ROS激光SLAM与Kinect摄像头的协作机器人设计python源码.zip基于ROS激光SLAM与Kinect摄像头的协作机器人设计python源码.zip基于ROS激光SLAM与Kinect...
一个激光slam的matlab仿真程序,代码有解释,对学习slam很有帮助
标签: c++
激光SLAM理论与实践第三章
这里比较一下视觉SLAM和激光SLAM的区别,仅比较其在特征提取和匹配上的一些不同,这里拿视觉SLAM算法:ORB-SLAM系列和激光SLAM算法:LOAM系列对比。
基于ROS melodic底盘控制器+STM32的一个2D激光SLAM自主导小车完整源码+项目资料+演示视频.zip基于ROS melodic底盘控制器+STM32的一个2D激光SLAM自主导小车完整源码+项目资料+演示视频.zip基于ROS melodic底盘控制器+...
移动机器人激光SLAM导航(三):Hector SLAM 篇
基于MATLAB和GAZEBO的激光slam仿真源码+全部数据(高分课程设计).zip已获导师指导并通过的97分的高分课程设计项目,可作为课程设计和期末大作业,下载即用无需修改,项目完整确保可以运行。 基于MATLAB和GAZEBO的...
移动机器人激光SLAM导航(一):理论基础篇