
”移动机器人“ 的搜索结果
移动机器人是机器人的一个重要的分支,在无人驾驶、太空探索、海洋勘探和医疗服务等领域得到了广泛的使用。其中轮式移动机器人是一个重要的分支,轮式移动机器人又可以根据驱动方式的不同分为阿克曼结构,两轮差速...
移动机器人原理英文原版.zip
标签: 移动机器人
讲述移动机器人原理与设计,英文原版,字体清晰,非扫描版
在雷达的头部分别有一个激光发射头和线性的CCD接收头。小鱼特意拆了个雷达,放张图给大家看看右边黑色的是发射头,左边是CCD接收头,发射头发射出的光属于波长大约在1000nm左右的红外光,肉眼是不可见的。...
本文对高飞老师的移动机器人运动规划课程第一章做了学习记录,方便日后复习回顾

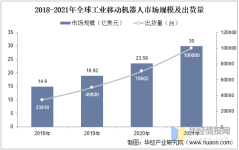
1.移动机器人发展现状
标签: 人工智能
包含n个控制点(含起点和终点)B样条曲线的移动机器人轨迹规划程序,所生成的轨迹必须严格经过起点、第三个控制点和终点(可调)
轮式自主移动机器人编程实战.docx
自定义移动机器人模型Gazebo仿真
标签: 学习
ROS学习(九)自定义移动机器人模型Gazebo仿真,对应源码。博客地址:https://blog.csdn.net/u011832219/article/details/115035134
T_SSITS 503-2022 工业应用移动机器人 复合机器人技术规范.pdf
知识梳理与读后感
移动机器人SLAM技术.doc
标签: 文档资料
移动机器人SLAM技术 作者:孙博雅 来源:《电子技术与软件工程》2018年第02期 摘 要 在太空探索宇航领域、工业自动化领域、以及军事服务等领域移动机器人系统技术有着 广泛的发展前景。SLAM技术的是simultaneous ...
首先, 基于拉格朗日方程建立移动机器人模型; 然后, 根据侧向误差和角度误差的关系设计引导角, 将该引导角作为虚拟输入, 结合Backstepping 方法设计基于移动机器人运动学模型的轨迹跟踪控制律, 并给出参数选取条件; ...
对差速移动机器人轨迹跟踪问题,提出一种使用PID环节对航向角和距离进行控制算法。首先对实际GPS传感器的经纬度进行转换,其次建立差速移动机器人运动学模型,最后利用控制算法对离散的数据点进行跟踪并与PurePursuit...
移动机器人路径规划是机器人学的一个最基本也是最复杂的问题,它被描述成: 给定一个移动机器人所处的环境(环境可以通过移动机器人视觉系统或者别的途径获得),一个起始点和一个期望的终止点,移动机器人路径...
轮式移动机器人动力学是从有关该主题的标准论文中研究的,并进行非线性反馈线性化以将运动方程简化为轮式机器人位置误差的二阶动力学方程。 AVI 文件录制也可用于以后轻松查看。 只需取消注释 PLOTBOT_WMR 文件中标...
移动机器人定位导航性能评估规范(征求意见稿2020).pdf
自主移动机器人导论:3 Mobile Robot Introduction - Kinematics.pdf
移动机器人的运动学反演控制 基础内容 没有优化
本文综述了智能移动机器人技术的历史!研究现状及未来展望
移动机器人教程兰在线课程的幻灯片和作业
【机器人】Car-Like小车移动机器人控制实验(word报告+matlab程序代码)
本文构建四轮驱动移动机器人(4WD)的数学运动模型,可在“混沌无形”免费下载本文PDF
采用蚁群算法对路径规划 进行求解. 包含数据和源代码,可展示!
车轮打滑的轮式移动机器人基于Unscented Kalman滤波的自适应跟踪控制
KUKA机器人断电移动机器人(抱闸释放).pdf,这是一份不错的文件
利用backstepping算法设计的移动机器人轨迹跟踪控制器matlab源代码 利用backstepping算法设计的移动机器人轨迹跟踪控制器matlab源代码
《移动机器人原理与设计》第六章移动机器人感知.ppt该文档详细且完整,值得借鉴下载使用,欢迎下载使用,有问题可以第一时间联系作者~
移动机器人的滑模轨迹跟踪控制,利用MATLAB进行仿真
推荐文章
- C++语法基础--标准库类型--bitset-程序员宅基地
- [C++] 第三方线程池库BS::thread_pool介绍和使用-程序员宅基地
- 如何使用openssl dgst生成哈希、签名、验签-程序员宅基地
- ios---剪裁圆形图片方法_ios软件圆形剪裁-程序员宅基地
- No module named 'matplotlib.finance'及name 'candlestick_ochl' is not defined强力解决办法-程序员宅基地
- 基于java快递代取计算机毕业设计源码+系统+lw文档+mysql数据库+调试部署_快递企业涉及到的计算机语言-程序员宅基地
- RedisTemplate与zset redis_redistemplate zset-程序员宅基地
- 服务器虚拟化培训计划,vmware虚拟机使用培训(一)概要.ppt-程序员宅基地
- application/x-www-form-urlencoded方式对post请求传参-程序员宅基地
- 网络安全常见十大漏洞总结(原理、危害、防御)-程序员宅基地