”观测独立性假设“ 的搜索结果
HMM模型的基本假设包括有限历史性假设、齐次性假设和观测独立性假设。HMM由初始状态向量π、状态转移矩阵A和观测概率矩阵B决定,这些要素决定了HMM模型的行为。HMM模型涉及三个基本问题:评估问题、解码问题和学习...

目录导引5 分类数据的关联分析5.1 r×sr\times sr×s列联表5.2 χ2\chi^2χ2独立性检验和齐性检验5.2.1 独立性检验5.2.2 齐性检验5.3 Fisher 精确性检验5.4 Mantel-Haenszel 检验5.5 关联规则5.5.1 基本概念5.5.2 ...
统计测试最常见的领域之一是测试列联表中的独立性。在这篇文章中,我将展示如何计算列联表,我将在列联表中引入两个流行的测试:卡方检验和Fisher精确检验。 什么是列联表? 列联表提供关于两个分类变量的测量的...
最常用的应该就是用来于比较两个或多个组间的平均值是否有显著差异。F检验的原理是,如果两个或多个组间的平均值或其他统计量之间存在显著差异,则组间方差(inter-group variance)会较大,而组内方差(intra-group...
标签:这本《例解回归分析第5版》属于统计学精品译丛系列,这个系列的书都非常不错,以下是该书的阅读笔记一、回归分析的步骤1.问题陈述是指明确要分析研究的问题2.选择相关变量选择用于解释因变量的自变量3....

为了消除观测信号中的噪声,利用独立分量分析的冗余取消特性,提出一种新的信号消噪方法....该方法不需要大量的观测样本,无需观测信号为确定性信号的前提假设,实现了对单个观测样本的实时消噪处理。
它是关于时序的概率模型,描述由一个隐藏的马尔可夫链随随机生成不可观测的状态随机序列,再由各个状态生成一个观测从而产生观测随机序列的过程。隐藏的马尔科夫链随机生成的状态的序列,称为状态序列;每个状态生成...

先引用一段R IN ACTION 的话:R提供了多种检验类别型变量独立性的方法。本节中描述的三种检验分别为卡方独立性检验、Fisher精确检验和Cochran-Mantel–Haenszel检验。 你可以使用chisq.test()函数对二维表的行变量和...

GNSS观测方程及常用组合(全) 文章目录GNSS观测方程及常用组合(全)1. GNSS观测方程2.同类型不同频率观测值的线性组合1.组合标准2. 窄巷组合3.宽巷组合4.无电离层组合3.不同类型双频观测值的组合1. MW组合2.电离层残差...
因此,我们引出了一系列假设,来确保这样做是合理的。 最后我们通过一个模拟数据集,展示了如何计算因果效应,以及是否使用协变量是有较大差异的。 ==改进:== 最后我们使用的是线性回归来估计条件期望
统计学-【假设检验】 知识点总结
标签: 假设检验
(1)假设检验依据的原理是小概率时间在抽样中不易,0生的原理。一般将不易发生的时间作为。备择假设为。一般都会设置一个小概率a,作为小概率发生的一个上限。 即当统计出的P值(小概率时间发生的实际概率)<a,...
这里可以举个例子,就好比医生在帮病人看病的时候,病人手里的化验单以及各种检测证明(假设证明之间相互独立),就是特征条件,医生就好比是一个分类器,输入了一堆特征条件x,然后进行判断病人具体得的是什么病也...
个或多个总体比例的相等性的检验 例子: 三个或多个总体比例相等性的卡方检验的一般步骤 多重比较方法 我们使用卡方检验得到三个汽车车主总体的总体比例不全相等的结论。因此,有些总体比例之间存在差异,而且...
在学习统计学贾书的过程,在第6—14章节出有许多需要理解与记忆的公式和概念,在此通过博客的形式做一次梳理,主要内容为统计学中抽样分布、假设检验、参数估计、分类数据分析、方差分析、一元二元线性分析、时间...
Hello,大家好,我是starz。这是本系列的第二篇《概率基础Ⅱ》,虽说是概率基础,但作为过渡,它开始以图为载体 这节的主要内容有: 贝叶斯网络 三种结构 ...二是基于有向图的贝叶斯...
熵(信息熵)可被认为是系统不确定性(混乱程度)的度量,熵值越大,系统越混乱。 一个X值域为{x1, ..., xn}的随机变量的熵值H定义为: 其中,E 代表了期望函数,而I(X)是X的信息量(又称为信息本体),熵是随机变量...
假设检验/T检验/F检验/Z检验/卡方检验
马尔可夫链不是自问世以来就叫马尔科夫链,它是由俄国数学家安德雷·马尔可夫(Андрей Андреевич Марков)在1906-1907年间,发表了一篇研究,这篇研究中为了证明:随机变量间的独立性不是弱...
HMM是关于时序的概率模型,描述由一个隐藏的马尔可夫链随机生成不可观测的状态随机序列(状态序列),再由各个状态生成一个观测而产生的观测随机序列(观测序列)的过程。 一堆拗口的术语?下边慢慢道来…...
http://blog.csdn.net/pipisorry/article/details/52599451基础知识数据缺失的三种情形:数据的似然和观测模型Note: MLE中是将联合概率P(x,y)赋值给实例。缺失数据的处理:不仅...随机变量X、观测变量O和实际观测YNot
[PRML]图模型-条件独立
标签: 机器学习
考虑三个变量aaa、bbb和ccc,假设aaa在给定bbb和ccc下的条件分布不依赖于bbb的值,则: p(a∣b,c)=p(a∣c)p(a|b,c)=p(a|c)p(a∣b,c)=p(a∣c) 读作在给定ccc下aaa独立于bbb。 如果我们考虑以c为条件的a和b的联合分布...
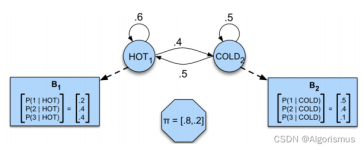
读论文遇到HMM模型,记录一些学习笔记。 HMM适合描述有时变序列和隐藏(不可观察)行为的场景。...(2)观测独立性假设(针对观测序列) 任意时刻的观测只依赖于该时刻的隐藏的状态,与其他任何时刻观测和状态都无关。
推荐文章
- PhotoZoom Classic 7中的新功能-程序员宅基地
- tensorflow中tf.keras.models.Sequential()用法-程序员宅基地
- Java递归实现Fibonacci数列计算_用递归方法编程计算fibonacci数列:(n=10),fac.jpg-程序员宅基地
- scratch班级名称 电子学会图形化编程scratch等级考试四级真题和答案解析B卷2020-9-程序员宅基地
- 郁金香2021年游戏辅助技术中级班(七)_squad辅助科技-程序员宅基地
- ssh登录qemu虚拟机里的linux系统_qemu ssh连接-程序员宅基地
- 用netty实现zcool_Netty框架入门-程序员宅基地
- SpringBoot 过滤器 filter 3种方法_spring boot filter 配置-程序员宅基地
- Ubuntu下,Python源码制作deb包_unmet build dependencies: debhelper (>= 11)-程序员宅基地
- 13. PyQt5实现多页面切换之QTabWidget_pyqt5 tabwidget-程序员宅基地