本文介绍了相关的规划基础知识
”规划“ 的搜索结果

【全覆盖路径规划】全覆盖路径规划代码

讲述机器人运动规划原理的经典书籍。 《规划算法》目录: 第Ⅰ部分 介绍性的资料 第1章 绪论 1.1 从规划(的过程)到规划(的结果) 1.2 实例与应用 1.3 规划的基本组成 1.4 算法、规划器与规划 ...



我的大三的机器人控制原理课程设计及,利用机器人工具箱,进行六自由度的机械臂的直线轨迹规划和圆弧轨迹规划,完全可用,参数可改,有注释说明

合集包括了模糊算法、遗传算法、A*算法MATLAB仿真,算法仿真可用。
点到点轨迹规划的S曲线,已知起始位置、终止位置、最大速度、最大加速度、总的运动时间、这5个参数,自动计算出运动规划曲线(若输入的参数不合适,代码可以自行计算出合适参数)
利用粒子群算法做水下机器人的路径规划,障碍物在此文件中设为圆形,并绘制出路径图和收敛曲线图

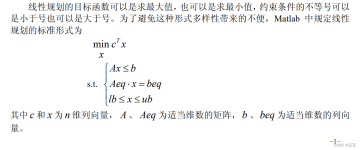
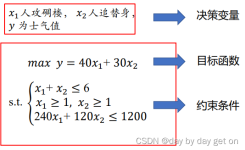
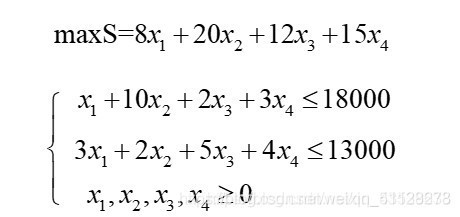
4.1 数学规划介绍 1、数学规划模型的定义 2、数学规划模型 2.1、企业生产计划 3、例1 加工奶制品的生产计划 3.1、整数规划(Integer Programming,简记IP) 4、0-1规划模型 选课策略 5、非线性规划模型 5.1、非线性...
一、整数规划、 1、整数规划概念、 2、整数规划分类、 二、整数规划示例、 三、整数规划解决的核心问题、 四、整数规划问题解的特征、 五、整数规划问题 与 松弛问题 示例、 六、分支定界法、 1、整数规划概念、 2、...
目录 第1章 需求分析 4 1.1 实施背景 4 1.2 网络应用需求 4 1.3 网络性能需求 6 1.4 信息点统计 6 第2章 网络总体设计 7 2.1 网络设计总体要求 7 2.1布线的设计 8 2.2 楼宇间互连的介质选择 9 2.3 主干网带宽的考虑 ...
动态规划(Dynamic Programming,简称DP)是一种解决多阶段决策问题的数学优化方法。它将原问题分解成若干个子问题,通过解决子问题只需解决一次并将结果保存下来,从而避免了重复计算,提高了算法效率。通俗来讲,...

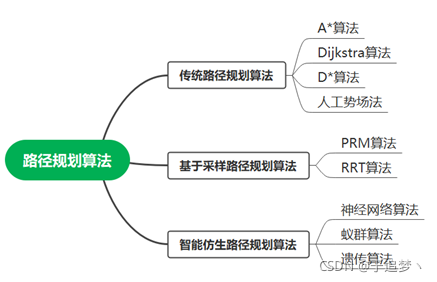
总的来说,路径的优化方法还是比路径的采样方法好,耗时少,但是采样也有采样的优点。每个场景结合不同的规划算法,会比较合适。

推荐文章
- centos7初始化mysql 5.7.9(源码安装)-程序员宅基地
- undefined reference to `cvHaarDetectObjects'()(人脸检测)_cvhaardetectobjects未定义-程序员宅基地
- 如何将参数传递给批处理文件?_批处理 传递参数-程序员宅基地
- C++的一些小总结 类 静态成员变量/函数 this指针_c++ class 静态指针函数-程序员宅基地
- springboot小区物业管理系统7ffeo[独有源码]如何选择高质量的计算机毕业设计_小区物业管理系统er图-程序员宅基地
- mac-gradle的安装和配置,掌握这些知识点再也不怕面试通不过_mac gradle配置-程序员宅基地
- 2032:【例4.18】分解质因数(信奥一本通)-程序员宅基地
- html怎么设置默认状态,网页中如何设置默认图片?方式介绍-程序员宅基地
- milp的matlab的案例代码_matlab30个案例分析案例5代码-程序员宅基地
- html实现/ 简约好看、美观大方的个人导航页源码/开源个人主页html源码_个人导航html-程序员宅基地